 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagnetic Sensor Compensation Utilizing Factor Graph Estimation
Dec 22, 2023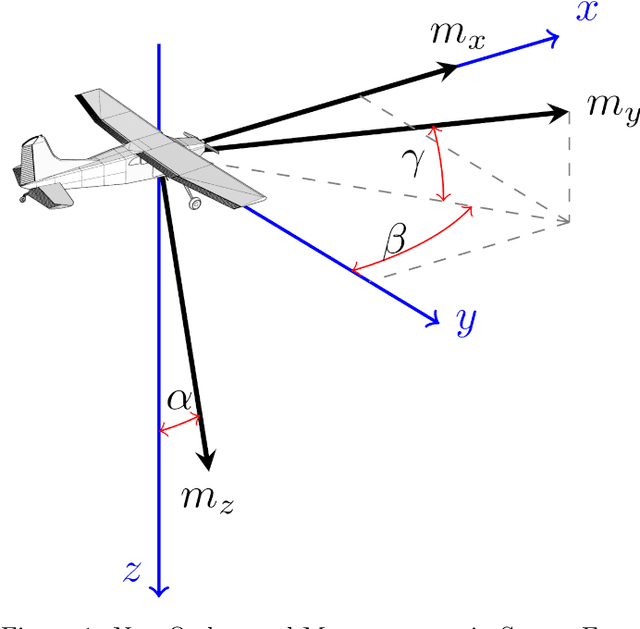
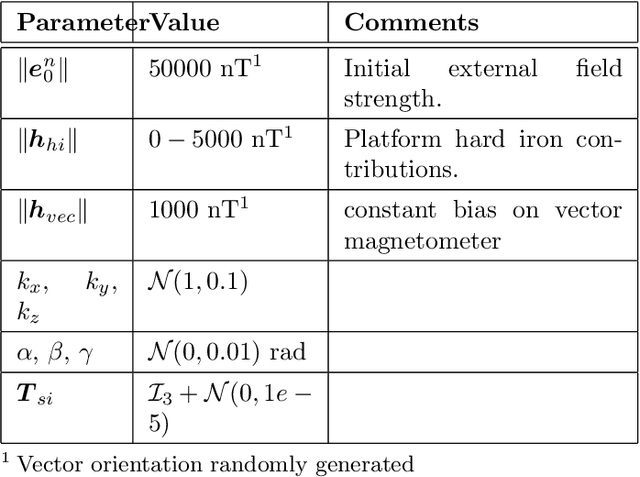
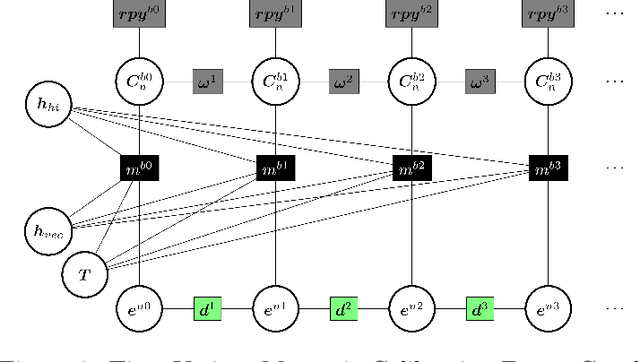
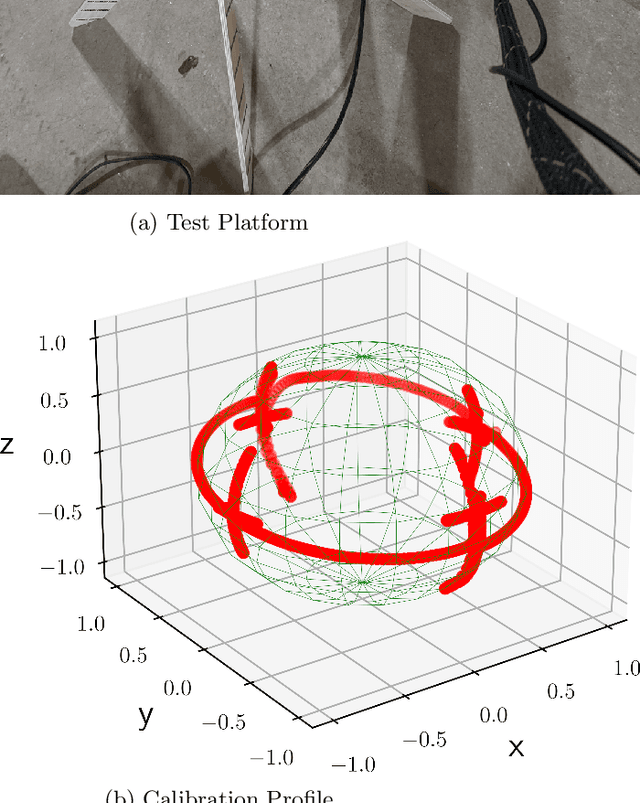
Recently, there has been significant interest in the ability to navigate without GPS using the magnetic anomaly field of the Earth (magnav). One of the key technical bottlenecks to achieving magnav is obtaining an accurate magnetic sensor calibration, taking into account own-ship and sensor effects. The Tolles-Lawson magnetic calibration method was developed when airborne magnetic survey aircraft were first employed 80 years ago. In this paper, we present a magnetic calibration algorithm based on a factor graph optimization using inertial measurements as well as inputs from both a vector and scalar magnetometer. The factor graph is well suited for combining multiple sensor inputs and allows accurate calibrations in the presence of large permanent moments as well as estimating a time-varying external magnetic field during the calibration, two problems that are difficult to solve with previous approaches. The ability to accurately calibrate a magnetic sensor in flight (i.e. with the presence of a large platform field and a varying Earth field due to movement) will allow greater flexibility in sensor mounting locations for magnetic anomaly navigation.
Robust Incremental State Estimation through Covariance Adaptation
Oct 11, 2019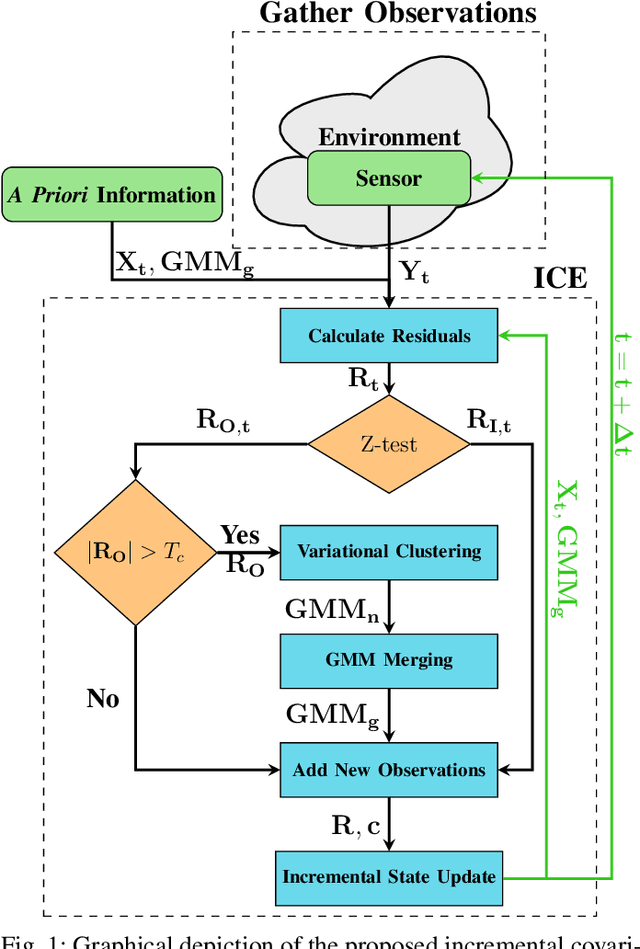
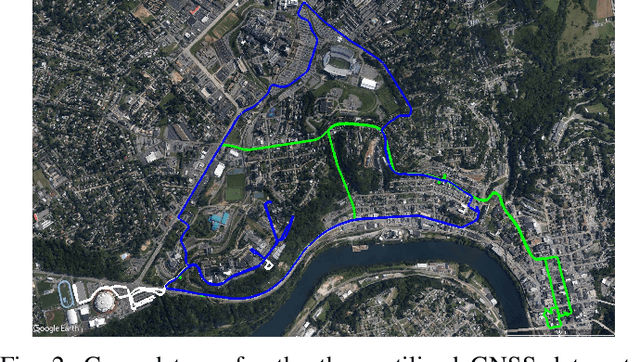
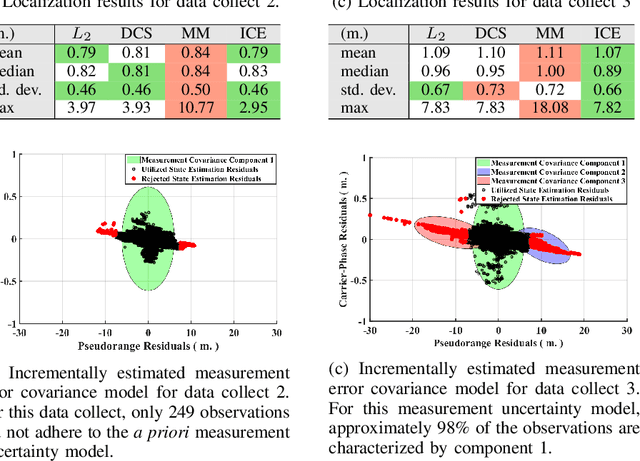
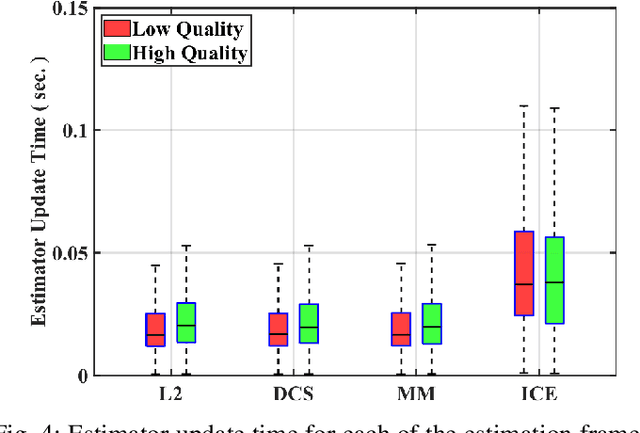
Recent advances in the fields of robotics and automation have spurred significant interest in robust state estimation. To enable robust state estimation, several methodologies have been proposed. One such technique, which has shown promising performance, is the concept of iteratively estimating a Gaussian Mixture Model (GMM), based upon the state estimation residuals, to characterize the measurement uncertainty model. Through this iterative process, the measurement uncertainty model is more accurately characterized, which enables robust state estimation through the appropriate de-weighting of erroneous observations. This approach, however, has traditionally required a batch estimation framework to enable the estimation of the measurement uncertainty model, which is not advantageous to robotic applications. In this paper, we propose an efficient, incremental extension to the measurement uncertainty model estimation paradigm. The incremental covariance estimation (ICE) approach, as detailed within this paper, is evaluated on several collected data sets, where it is shown to provide a significant increase in localization accuracy when compared to other state-of-the-art robust, incremental estimation algorithms.
Enabling Robust State Estimation through Measurement Error Covariance Adaptation
Jun 10, 2019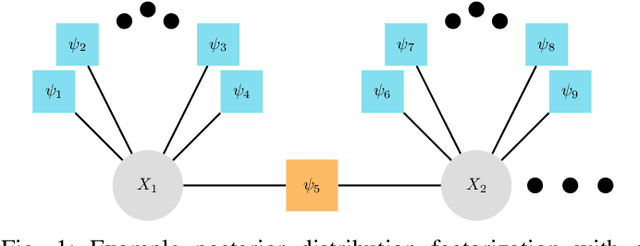
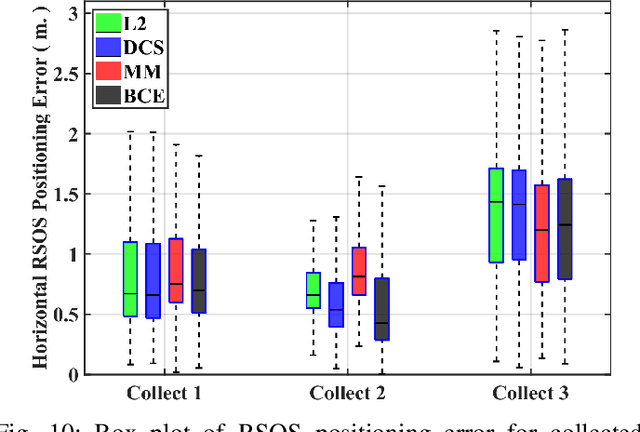
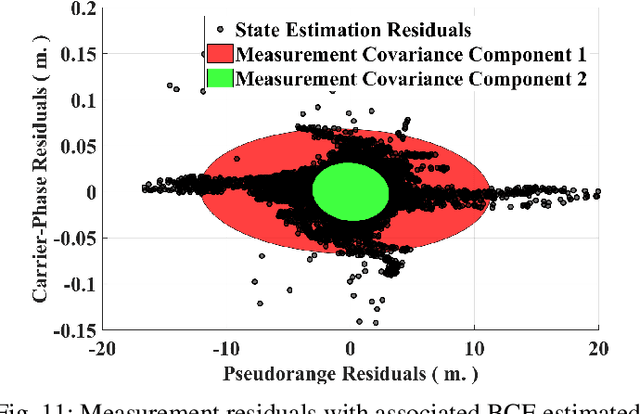
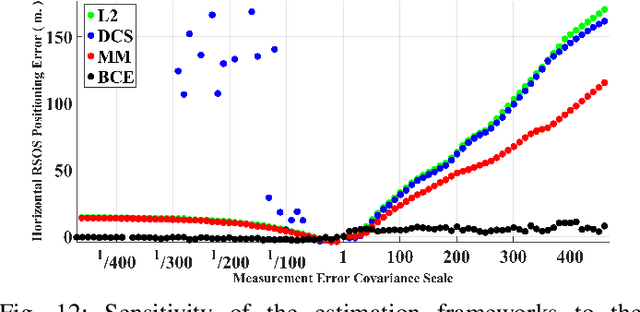
Accurate platform localization is an integral component of most robotic systems. As these robotic systems become more ubiquitous, it is necessary to develop robust state estimation algorithms that are able to withstand novel and non-cooperative environments. When dealing with novel and non-cooperative environments, little is known a priori about the measurement error uncertainty, thus, there is a requirement that the uncertainty models of the localization algorithm be adaptive. Within this paper, we propose one such technique that enables robust state estimation through the iterative adaptation of the measurement uncertainty model. The adaptation of the measurement uncertainty model is granted through non-parametric clustering of the residuals, which enables the characterization of the measurement uncertainty via a Gaussian mixture model. The provided Gaussian mixture model can be utilized within any non-linear least squares optimization algorithm by approximately characterizing each observation with the sufficient statistics of the assigned cluster (i.e., each observation's uncertainty model is updated based upon the assignment provided by the non-parametric clustering algorithm). The proposed algorithm is verified on several GNSS collected data sets, where it is shown that the proposed technique exhibits some advantages when compared to other robust estimation techniques when confronted with degraded data quality.