 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Incremental State Estimation through Covariance Adaptation
Paper and Code
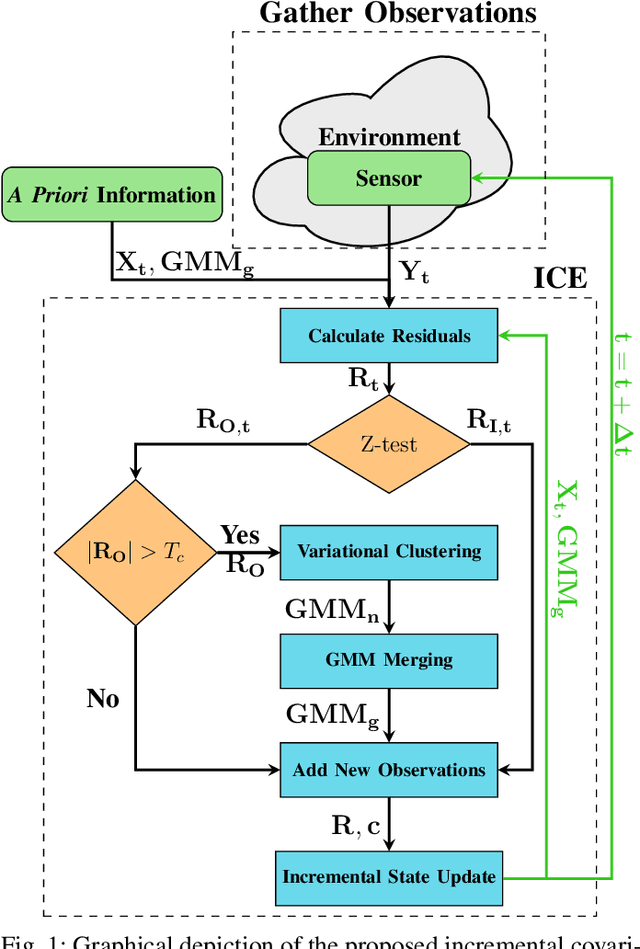
Recent advances in the fields of robotics and automation have spurred significant interest in robust state estimation. To enable robust state estimation, several methodologies have been proposed. One such technique, which has shown promising performance, is the concept of iteratively estimating a Gaussian Mixture Model (GMM), based upon the state estimation residuals, to characterize the measurement uncertainty model. Through this iterative process, the measurement uncertainty model is more accurately characterized, which enables robust state estimation through the appropriate de-weighting of erroneous observations. This approach, however, has traditionally required a batch estimation framework to enable the estimation of the measurement uncertainty model, which is not advantageous to robotic applications. In this paper, we propose an efficient, incremental extension to the measurement uncertainty model estimation paradigm. The incremental covariance estimation (ICE) approach, as detailed within this paper, is evaluated on several collected data sets, where it is shown to provide a significant increase in localization accuracy when compared to other state-of-the-art robust, incremental estimation algorithms.