 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Navigation In GNSS Degraded Environment Using Graph Optimization
Paper and Code
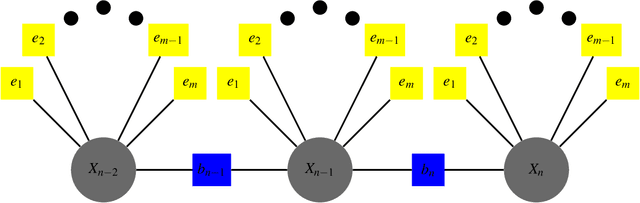
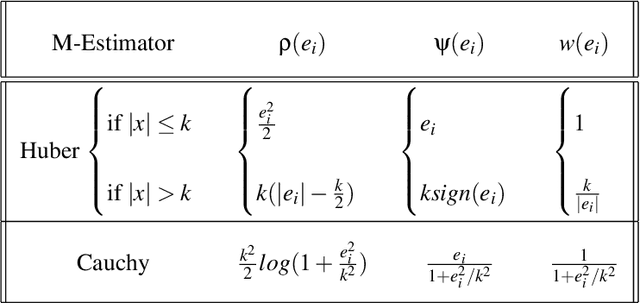
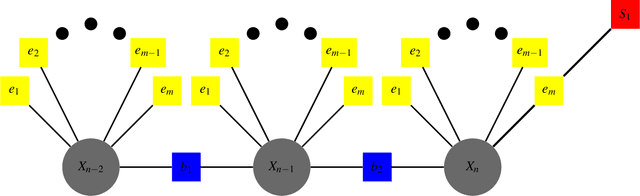
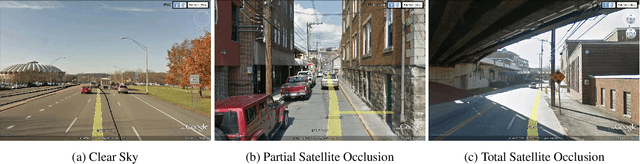
Robust navigation in urban environments has received a considerable amount of both academic and commercial interest over recent years. This is primarily due to large commercial organizations such as Google and Uber stepping into the autonomous navigation market. Most of this research has shied away from Global Navigation Satellite System (GNSS) based navigation. The aversion to utilizing GNSS data is due to the degraded nature of the data in urban environment (e.g., multipath, poor satellite visibility). The degradation of the GNSS data in urban environments makes it such that traditional (GNSS) positioning methods (e.g., extended Kalman filter, particle filters) perform poorly. However, recent advances in robust graph theoretic based sensor fusion methods, primarily applied to Simultaneous Localization and Mapping (SLAM) based robotic applications, can also be applied to GNSS data processing. This paper will utilize one such method known as the factor graph in conjunction several robust optimization techniques to evaluate their applicability to robust GNSS data processing. The goals of this study are two-fold. First, for GNSS applications, we will experimentally evaluate the effectiveness of robust optimization techniques within a graph-theoretic estimation framework. Second, by releasing the software developed and data sets used for this study, we will introduce a new open-source front-end to the Georgia Tech Smoothing and Mapping (GTSAM) library for the purpose of integrating GNSS pseudorange observations.