 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversally Safe Swerve Manoeuvres for Autonomous Driving
Jan 30, 2020

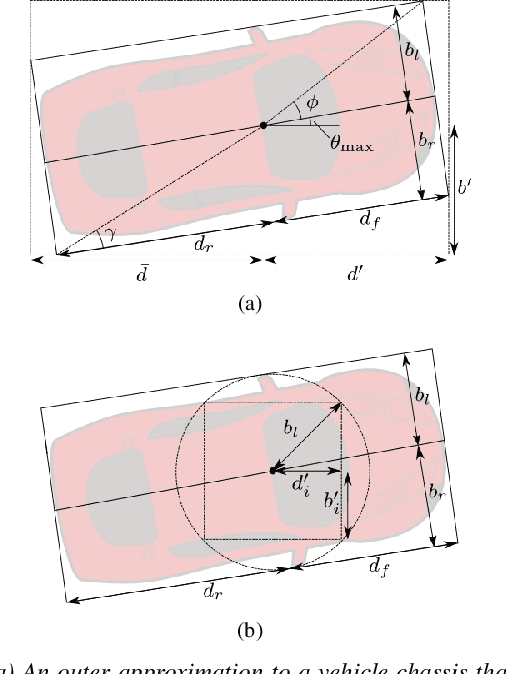
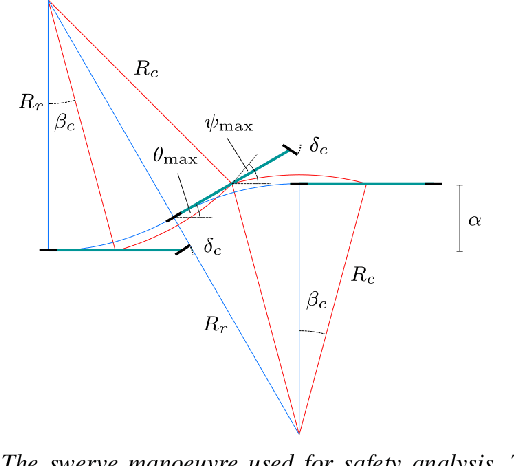
This paper characterizes safe following distances for on-road driving when vehicles can avoid collisions by either braking or by swerving into an adjacent lane. In particular, we focus on safety as defined in the Responsibility-Sensitive Safety (RSS) framework. We extend RSS by introducing swerve manoeuvres as a valid response in addition to the already present brake manoeuvre. These swerve manoeuvres use the more realistic kinematic bicycle model rather than the double integrator model of RSS. When vehicles are able to swerve and brake, it is shown that their required safe following distance at higher speeds is less than that required through braking alone. In addition, when all vehicles follow this new distance, they are provably safe. The use of the kinematic bicycle model is then validated by comparing these swerve manoeuvres to that of a dynamic single-track model.
Design Space of Behaviour Planning for Autonomous Driving
Aug 21, 2019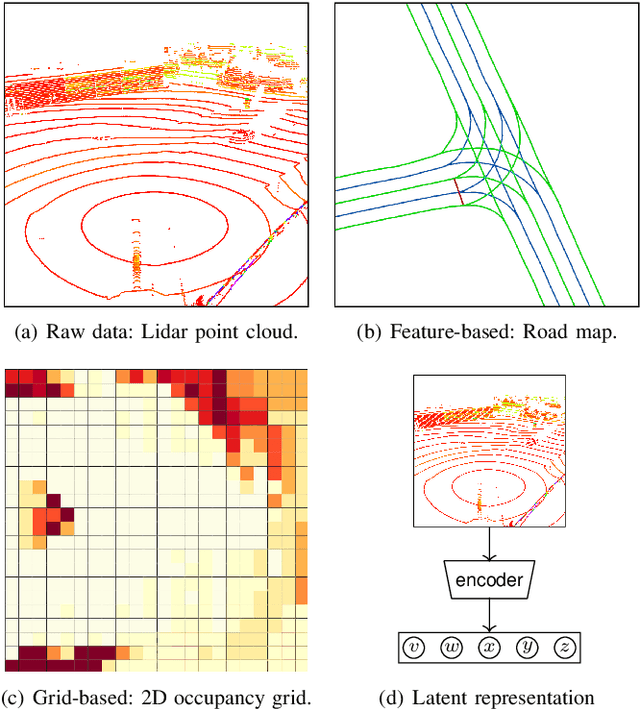
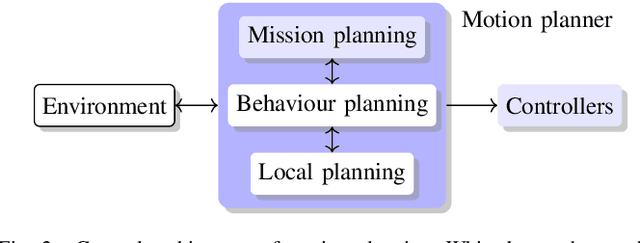
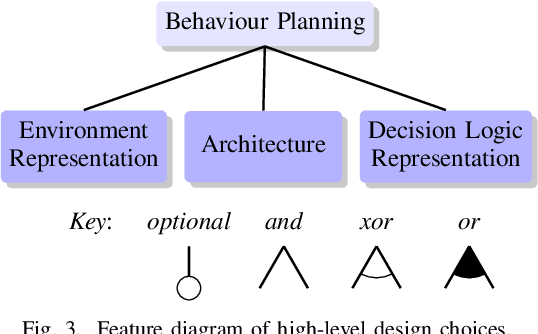
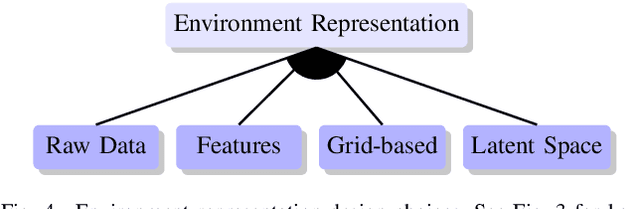
We explore the complex design space of behaviour planning for autonomous driving. Design choices that successfully address one aspect of behaviour planning can critically constrain others. To aid the design process, in this work we decompose the design space with respect to important choices arising from the current state of the art approaches, and describe the resulting trade-offs. In doing this, we also identify interesting directions of future work.
Learning a Lattice Planner Control Set for Autonomous Vehicles
Mar 05, 2019

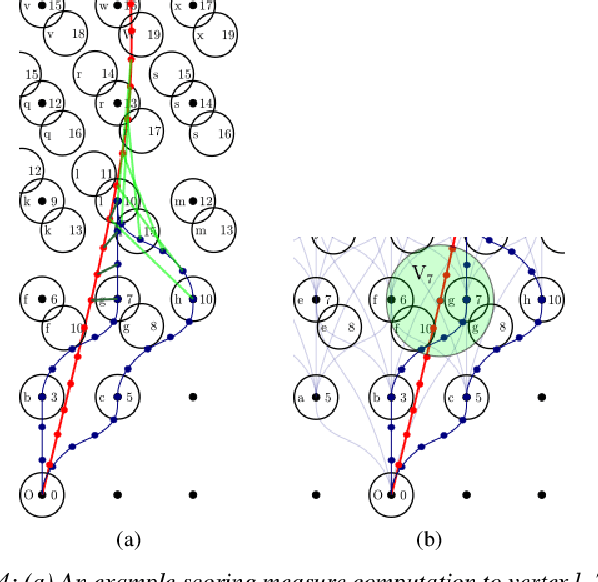

In this paper, we introduce a method to compute a sparse lattice planner control set that is suited to a particular task by learning from a representative dataset of vehicle paths. To do this, we use a scoring measure similar to the Fr\'echet distance and propose an algorithm for evaluating a given control set according to the scoring measure. Control actions are then selected from a dense control set according to an objective function that rewards improvements in matching the dataset while also encouraging sparsity. This method is evaluated across several experiments involving real and synthetic datasets, and it is shown to generate smaller control sets when compared to the previous state-of-the-art lattice control set computation technique, with these smaller control sets maintaining a high degree of manoeuvrability in the required task. This results in a planning time speedup of up to 4.31x when using the learned control set over the state-of-the-art computed control set. In addition, we show the learned control sets are better able to capture the driving style of the dataset in terms of path curvature.
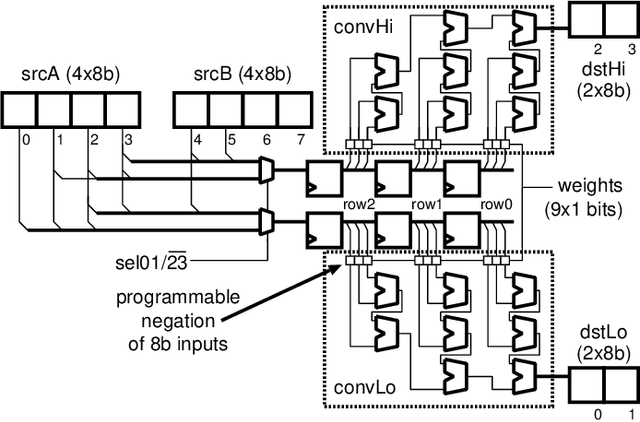
TinBiNN: Tiny Binarized Neural Network Overlay in about 5,000 4-LUTs and 5mW
Mar 05, 2019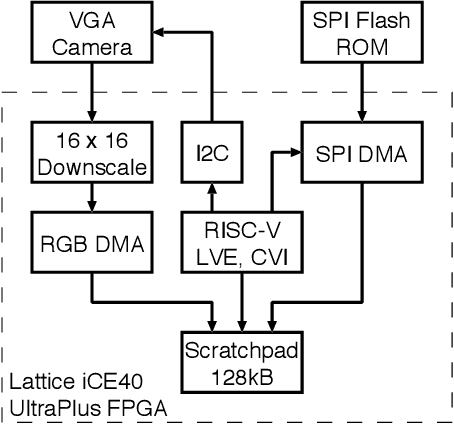


Reduced-precision arithmetic improves the size, cost, power and performance of neural networks in digital logic. In convolutional neural networks, the use of 1b weights can achieve state-of-the-art error rates while eliminating multiplication, reducing storage and improving power efficiency. The BinaryConnect binary-weighted system, for example, achieves 9.9% error using floating-point activations on the CIFAR-10 dataset. In this paper, we introduce TinBiNN, a lightweight vector processor overlay for accelerating inference computations with 1b weights and 8b activations. The overlay is very small -- it uses about 5,000 4-input LUTs and fits into a low cost iCE40 UltraPlus FPGA from Lattice Semiconductor. To show this can be useful, we build two embedded 'person detector' systems by shrinking the original BinaryConnect network. The first is a 10-category classifier with a 89% smaller network that runs in 1,315ms and achieves 13.6% error. The other is a 1-category classifier that is even smaller, runs in 195ms, and has only 0.4% error. In both classifiers, the error can be attributed entirely to training and not reduced precision.