 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Space of Behaviour Planning for Autonomous Driving
Aug 21, 2019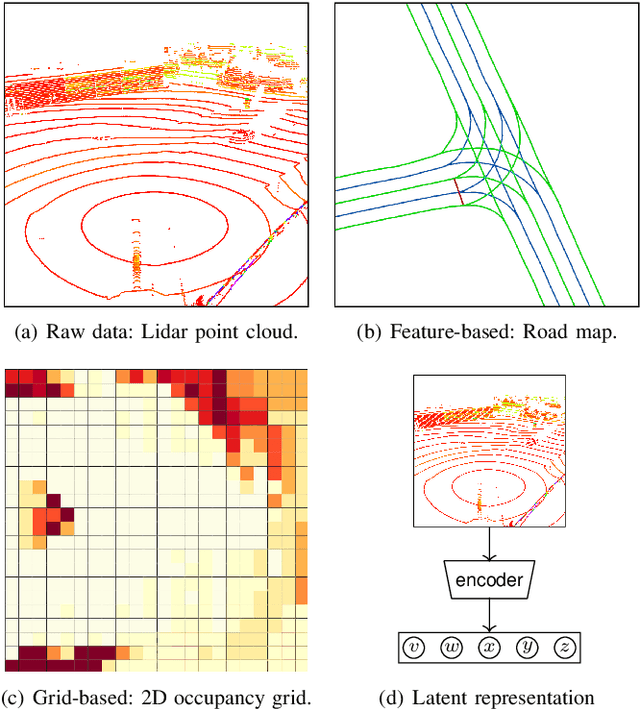
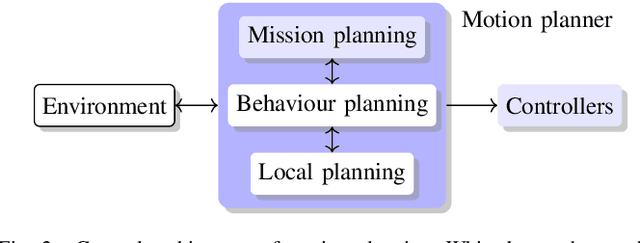
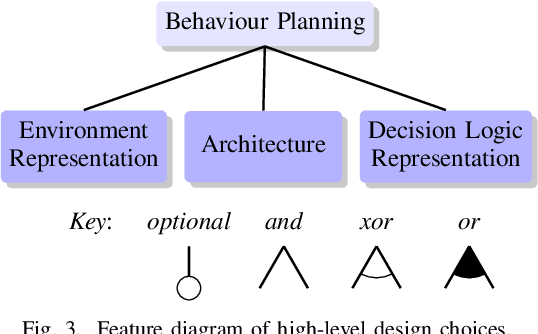
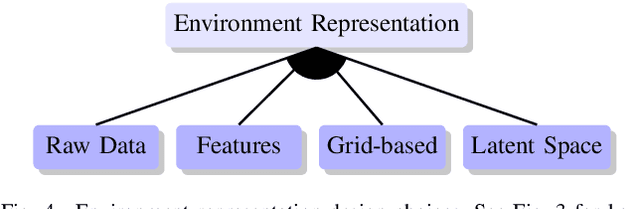
We explore the complex design space of behaviour planning for autonomous driving. Design choices that successfully address one aspect of behaviour planning can critically constrain others. To aid the design process, in this work we decompose the design space with respect to important choices arising from the current state of the art approaches, and describe the resulting trade-offs. In doing this, we also identify interesting directions of future work.
WiseMove: A Framework for Safe Deep Reinforcement Learning for Autonomous Driving
Feb 11, 2019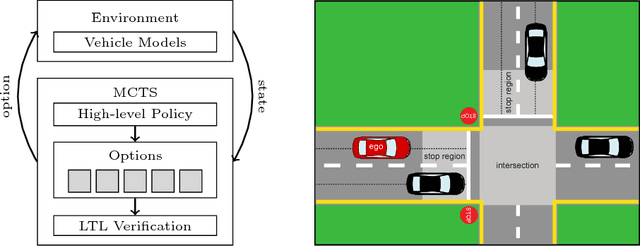
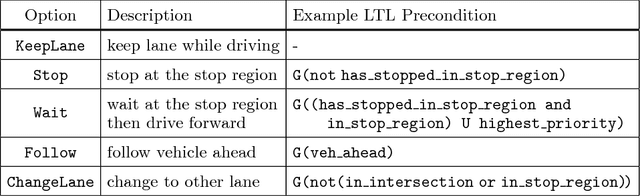


Machine learning can provide efficient solutions to the complex problems encountered in autonomous driving, but ensuring their safety remains a challenge. A number of authors have attempted to address this issue, but there are few publicly-available tools to adequately explore the trade-offs between functionality, scalability, and safety. We thus present WiseMove, a software framework to investigate safe deep reinforcement learning in the context of motion planning for autonomous driving. WiseMove adopts a modular learning architecture that suits our current research questions and can be adapted to new technologies and new questions. We present the details of WiseMove, demonstrate its use on a common traffic scenario, and describe how we use it in our ongoing safe learning research.