 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImaging at the quantum limit with convolutional neural networks
Jun 16, 2025Deep neural networks have been shown to achieve exceptional performance for computer vision tasks like image recognition, segmentation, and reconstruction or denoising. Here, we evaluate the ultimate performance limits of deep convolutional neural network models for image reconstruction, by comparing them against the standard quantum limit set by shot-noise and the Heisenberg limit on precision. We train U-Net models on images of natural objects illuminated with coherent states of light, and find that the average mean-squared error of the reconstructions can surpass the standard quantum limit, and in some cases reaches the Heisenberg limit. Further, we train models on well-parameterized images for which we can calculate the quantum Cram\'er-Rao bound to determine the minimum possible measurable variance of an estimated parameter for a given probe state. We find the mean-squared error of the model predictions reaches these bounds calculated for the parameters, across a variety of parameterized images. These results suggest that deep convolutional neural networks can learn to become the optimal estimators allowed by the laws of physics, performing parameter estimation and image reconstruction at the ultimate possible limits of precision for the case of classical illumination of the object.
3D-2D Neural Nets for Phase Retrieval in Noisy Interferometric Imaging
Feb 08, 2024



In recent years, neural networks have been used to solve phase retrieval problems in imaging with superior accuracy and speed than traditional techniques, especially in the presence of noise. However, in the context of interferometric imaging, phase noise has been largely unaddressed by existing neural network architectures. Such noise arises naturally in an interferometer due to mechanical instabilities or atmospheric turbulence, limiting measurement acquisition times and posing a challenge in scenarios with limited light intensity, such as remote sensing. Here, we introduce a 3D-2D Phase Retrieval U-Net (PRUNe) that takes noisy and randomly phase-shifted interferograms as inputs, and outputs a single 2D phase image. A 3D downsampling convolutional encoder captures correlations within and between frames to produce a 2D latent space, which is upsampled by a 2D decoder into a phase image. We test our model against a state-of-the-art singular value decomposition algorithm and find PRUNe reconstructions consistently show more accurate and smooth reconstructions, with a x2.5 - 4 lower mean squared error at multiple signal-to-noise ratios for interferograms with low (< 1 photon/pixel) and high (~100 photons/pixel) signal intensity. Our model presents a faster and more accurate approach to perform phase retrieval in extremely low light intensity interferometry in presence of phase noise, and will find application in other multi-frame noisy imaging techniques.
Design Space of Behaviour Planning for Autonomous Driving
Aug 21, 2019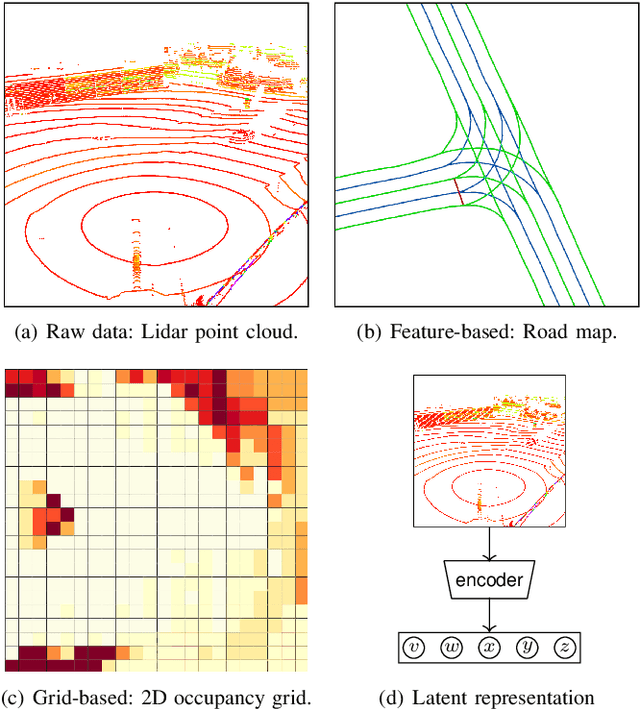
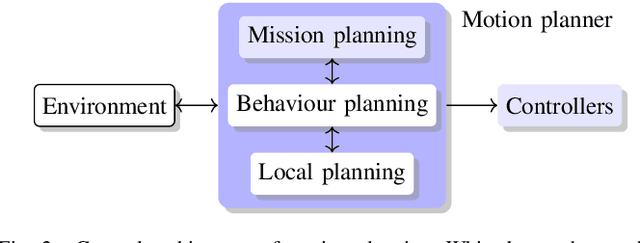
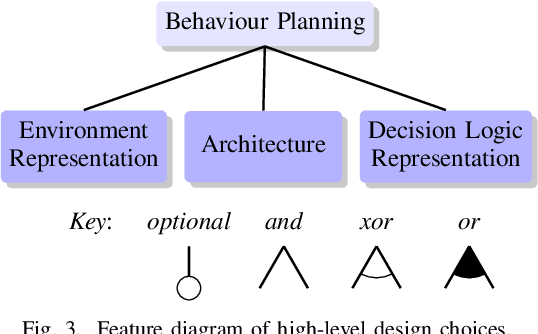
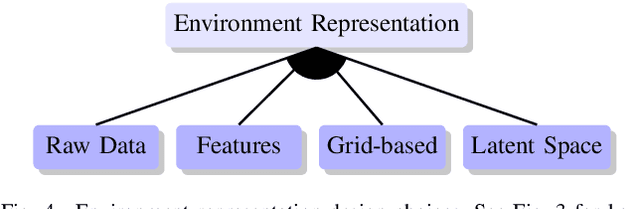
We explore the complex design space of behaviour planning for autonomous driving. Design choices that successfully address one aspect of behaviour planning can critically constrain others. To aid the design process, in this work we decompose the design space with respect to important choices arising from the current state of the art approaches, and describe the resulting trade-offs. In doing this, we also identify interesting directions of future work.