 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDATR: Diffusion-based 3D Apple Tree Reconstruction Framework with Sparse-View
Aug 27, 2025Digital twin applications offered transformative potential by enabling real-time monitoring and robotic simulation through accurate virtual replicas of physical assets. The key to these systems is 3D reconstruction with high geometrical fidelity. However, existing methods struggled under field conditions, especially with sparse and occluded views. This study developed a two-stage framework (DATR) for the reconstruction of apple trees from sparse views. The first stage leverages onboard sensors and foundation models to semi-automatically generate tree masks from complex field images. Tree masks are used to filter out background information in multi-modal data for the single-image-to-3D reconstruction at the second stage. This stage consists of a diffusion model and a large reconstruction model for respective multi view and implicit neural field generation. The training of the diffusion model and LRM was achieved by using realistic synthetic apple trees generated by a Real2Sim data generator. The framework was evaluated on both field and synthetic datasets. The field dataset includes six apple trees with field-measured ground truth, while the synthetic dataset featured structurally diverse trees. Evaluation results showed that our DATR framework outperformed existing 3D reconstruction methods across both datasets and achieved domain-trait estimation comparable to industrial-grade stationary laser scanners while improving the throughput by $\sim$360 times, demonstrating strong potential for scalable agricultural digital twin systems.
Joint 3D Point Cloud Segmentation using Real-Sim Loop: From Panels to Trees and Branches
Mar 07, 2025Modern orchards are planted in structured rows with distinct panel divisions to improve management. Accurate and efficient joint segmentation of point cloud from Panel to Tree and Branch (P2TB) is essential for robotic operations. However, most current segmentation methods focus on single instance segmentation and depend on a sequence of deep networks to perform joint tasks. This strategy hinders the use of hierarchical information embedded in the data, leading to both error accumulation and increased costs for annotation and computation, which limits its scalability for real-world applications. In this study, we proposed a novel approach that incorporated a Real2Sim L-TreeGen for training data generation and a joint model (J-P2TB) designed for the P2TB task. The J-P2TB model, trained on the generated simulation dataset, was used for joint segmentation of real-world panel point clouds via zero-shot learning. Compared to representative methods, our model outperformed them in most segmentation metrics while using 40% fewer learnable parameters. This Sim2Real result highlighted the efficacy of L-TreeGen in model training and the performance of J-P2TB for joint segmentation, demonstrating its strong accuracy, efficiency, and generalizability for real-world applications. These improvements would not only greatly benefit the development of robots for automated orchard operations but also advance digital twin technology.
Generating high-quality 3DMPCs by adaptive data acquisition and NeREF-based reflectance correction to facilitate efficient plant phenotyping
May 11, 2023



Non-destructive assessments of plant phenotypic traits using high-quality three-dimensional (3D) and multispectral data can deepen breeders' understanding of plant growth and allow them to make informed managerial decisions. However, subjective viewpoint selection and complex illumination effects under natural light conditions decrease the data quality and increase the difficulty of resolving phenotypic parameters. We proposed methods for adaptive data acquisition and reflectance correction respectively, to generate high-quality 3D multispectral point clouds (3DMPCs) of plants. In the first stage, we proposed an efficient next-best-view (NBV) planning method based on a novel UGV platform with a multi-sensor-equipped robotic arm. In the second stage, we eliminated the illumination effects by using the neural reference field (NeREF) to predict the digital number (DN) of the reference. We tested them on 6 perilla and 6 tomato plants, and selected 2 visible leaves and 4 regions of interest (ROIs) for each plant to assess the biomass and the chlorophyll content. For NBV planning, the average execution time for single perilla and tomato plant at a joint speed of 1.55 rad/s was 58.70 s and 53.60 s respectively. The whole-plant data integrity was improved by an average of 27% compared to using fixed viewpoints alone, and the coefficients of determination (R2) for leaf biomass estimation reached 0.99 and 0.92. For reflectance correction, the average root mean squared error of the reflectance spectra with hemisphere reference-based correction at different ROIs was 0.08 and 0.07 for perilla and tomato. The R2 of chlorophyll content estimation was 0.91 and 0.93 respectively when principal component analysis and Gaussian process regression were applied. Our approach is promising for generating high-quality 3DMPCs of plants under natural light conditions and facilitates accurate plant phenotyping.
PST: Plant Segmentation Transformer Enhanced Phenotyping of MLS Oilseed Rape Point Cloud
Jun 27, 2022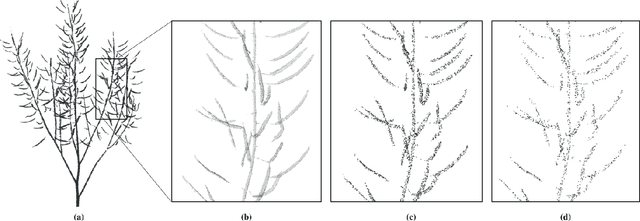
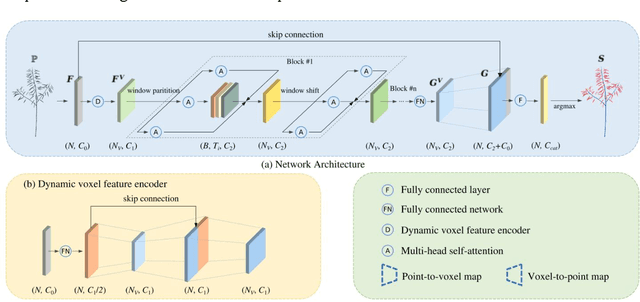
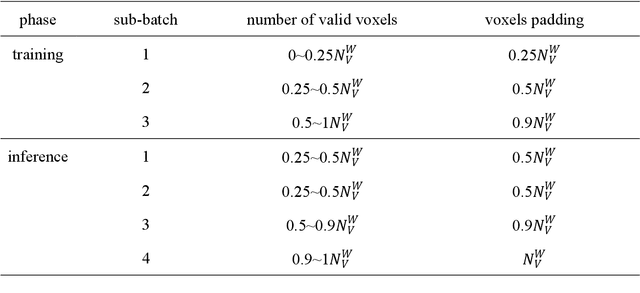

Segmentation of plant point clouds to obtain high-precise morphological traits is essential for plant phenotyping and crop breeding. Although the bloom of deep learning methods has boosted much research on the segmentation of plant point cloud, most works follow the common practice of hard voxelization-based or down-sampling-based methods. They are limited to segmenting simple plant organs, overlooking the difficulties of resolving complex plant point clouds with high spatial resolution. In this study, we propose a deep learning network plant segmentation transformer (PST) to realize the semantic and instance segmentation of MLS (Mobile Laser Scanning) oilseed rape point cloud, which characterizes tiny siliques and dense points as the main traits targeted. PST is composed of: (i) a dynamic voxel feature encoder (DVFE) to aggregate per point features with raw spatial resolution; (ii) dual window sets attention block to capture the contextual information; (iii) a dense feature propagation module to obtain the final dense point feature map. The results proved that PST and PST-PointGroup (PG) achieved state-of-the-art performance in semantic and instance segmentation tasks. For semantic segmentation, PST reached 93.96%, 97.29%, 96.52%, 96.88%, and 97.07% in mean IoU, mean Precision, mean Recall, mean F1-score, and overall accuracy, respectively. For instance segmentation, PST-PG reached 89.51%, 89.85%, 88.83% and 82.53% in mCov, mWCov, mPerc90, and mRec90, respectively. This study extends the phenotyping of oilseed rape in an end-to-end way and proves that the deep learning method has a great potential for understanding dense plant point clouds with complex morphological traits.