 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Distributed Online Training of Graph Neural Networks in Networked Systems
Dec 08, 2024


Graph neural networks (GNNs) are powerful tools for developing scalable, decentralized artificial intelligence in large-scale networked systems, such as wireless networks, power grids, and transportation networks. Currently, GNNs in networked systems mostly follow a paradigm of `centralized training, distributed execution', which limits their adaptability and slows down their development cycles. In this work, we fill this gap for the first time by developing a communication-efficient, fully distributed online training approach for GNNs applied to large networked systems. For a mini-batch with $B$ samples, our approach of training an $L$-layer GNN only adds $L$ rounds of message passing to the $LB$ rounds required by GNN inference, with doubled message sizes. Through numerical experiments in graph-based node regression, power allocation, and link scheduling in wireless networks, we demonstrate the effectiveness of our approach in training GNNs under supervised, unsupervised, and reinforcement learning paradigms.
Federated Learning with Heterogeneous Data Handling for Robust Vehicular Object Detection
May 02, 2024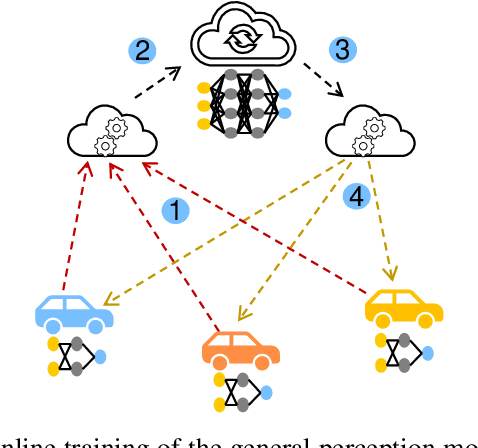
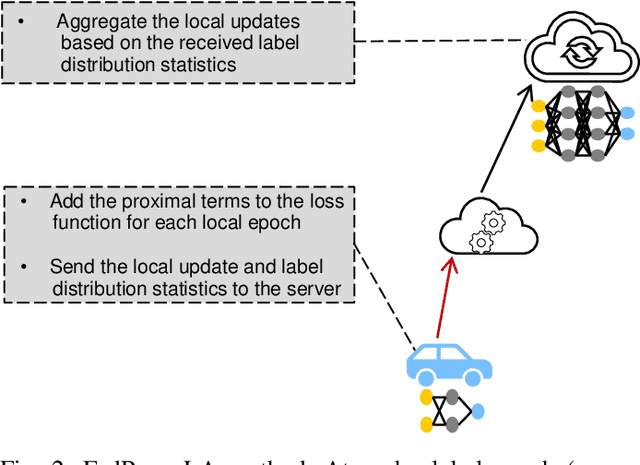
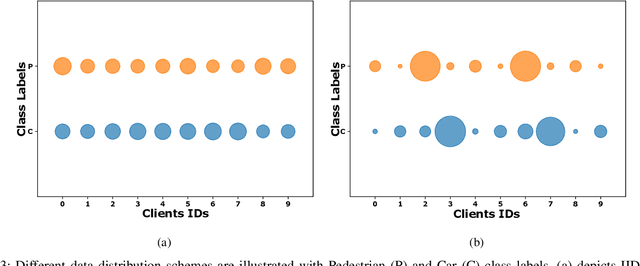
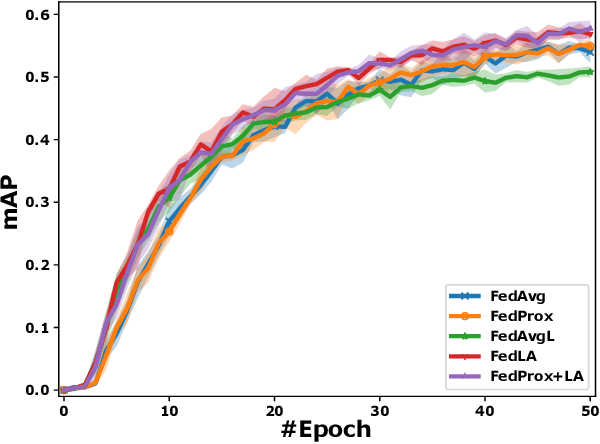
In the pursuit of refining precise perception models for fully autonomous driving, continual online model training becomes essential. Federated Learning (FL) within vehicular networks offers an efficient mechanism for model training while preserving raw sensory data integrity. Yet, FL struggles with non-identically distributed data (e.g., quantity skew), leading to suboptimal convergence rates during model training. In previous work, we introduced FedLA, an innovative Label-Aware aggregation method addressing data heterogeneity in FL for generic scenarios. In this paper, we introduce FedProx+LA, a novel FL method building upon the state-of-the-art FedProx and FedLA to tackle data heterogeneity, which is specifically tailored for vehicular networks. We evaluate the efficacy of FedProx+LA in continuous online object detection model training. Through a comparative analysis against conventional and state-of-the-art methods, our findings reveal the superior convergence rate of FedProx+LA. Notably, if the label distribution is very heterogeneous, our FedProx+LA approach shows substantial improvements in detection performance compared to baseline methods, also outperforming our previous FedLA approach. Moreover, both FedLA and FedProx+LA increase convergence speed by 30% compared to baseline methods.