 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Interactive Control Approach to 3D Shape Reconstruction
Oct 07, 2019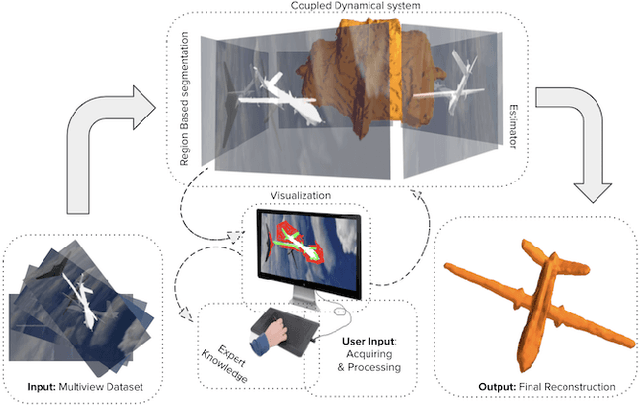
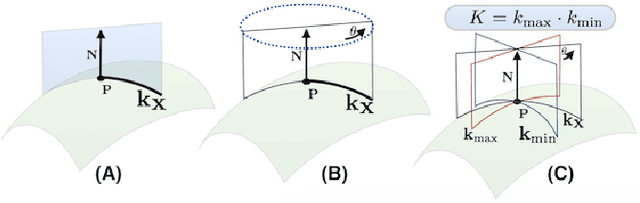

The ability to accurately reconstruct the 3D facets of a scene is one of the key problems in robotic vision. However, even with recent advances with machine learning, there is no high-fidelity universal 3D reconstruction method for this optimization problem as schemes often cater to specific image modalities and are often biased by scene abnormalities. Simply put, there always remains an information gap due to the dynamic nature of real-world scenarios. To this end, we demonstrate a feedback control framework which invokes operator inputs (also prone to errors) in order to augment existing reconstruction schemes. For proof-of-concept, we choose a classical region-based stereoscopic reconstruction approach and show how an ill-posed model can be augmented with operator input to be much more robust to scene artifacts. We provide necessary conditions for stability via Lyapunov analysis and perhaps more importantly, we show that the stability depends on a notion of absolute curvature. Mathematically, this aligns with previous work that has shown Ricci curvature as proxy for functional robustness of dynamical networked systems. We conclude with results that show how our method can improve standalone reconstruction schemes.
A Communication-Efficient Multi-Agent Actor-Critic Algorithm for Distributed Reinforcement Learning
Jul 06, 2019This paper considers a distributed reinforcement learning problem in which a network of multiple agents aim to cooperatively maximize the globally averaged return through communication with only local neighbors. A randomized communication-efficient multi-agent actor-critic algorithm is proposed for possibly unidirectional communication relationships depicted by a directed graph. It is shown that the algorithm can solve the problem for strongly connected graphs by allowing each agent to transmit only two scalar-valued variables at one time.
Interactive Image Segmentation From A Feedback Control Perspective
Sep 26, 2016
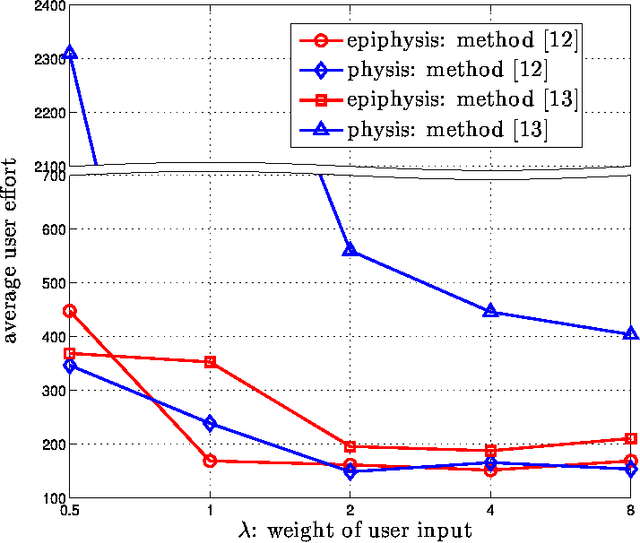
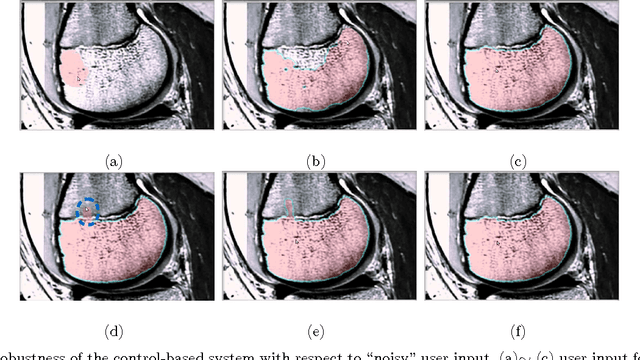

Image segmentation is a fundamental problem in computational vision and medical imaging. Designing a generic, automated method that works for various objects and imaging modalities is a formidable task. Instead of proposing a new specific segmentation algorithm, we present a general design principle on how to integrate user interactions from the perspective of feedback control theory. Impulsive control and Lyapunov stability analysis are employed to design and analyze an interactive segmentation system. Then stabilization conditions are derived to guide algorithm design. Finally, the effectiveness and robustness of proposed method are demonstrated.
Volumetric Mapping of Genus Zero Objects via Mass Preservation
May 06, 2012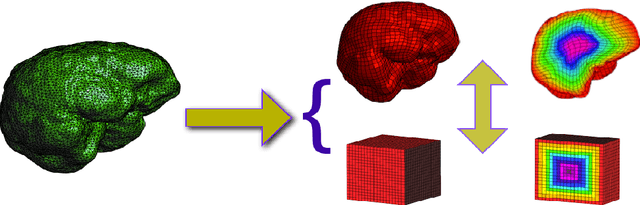
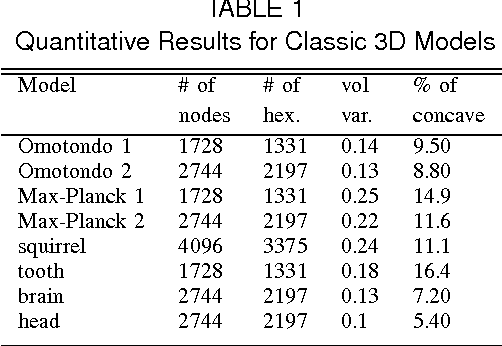
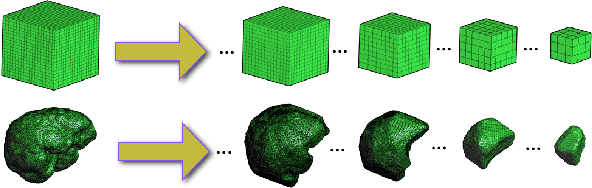

In this work, we present a technique to map any genus zero solid object onto a hexahedral decomposition of a solid cube. This problem appears in many applications ranging from finite element methods to visual tracking. From this, one can then hopefully utilize the proposed technique for shape analysis, registration, as well as other related computer graphics tasks. More importantly, given that we seek to establish a one-to-one correspondence of an input volume to that of a solid cube, our algorithm can naturally generate a quality hexahedral mesh as an output. In addition, we constrain the mapping itself to be volume preserving allowing for the possibility of further mesh simplification. We demonstrate our method both qualitatively and quantitatively on various 3D solid models