 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuality Model for Machine Learning Components
Feb 04, 2026Despite increased adoption and advances in machine learning (ML), there are studies showing that many ML prototypes do not reach the production stage and that testing is still largely limited to testing model properties, such as model performance, without considering requirements derived from the system it will be a part of, such as throughput, resource consumption, or robustness. This limited view of testing leads to failures in model integration, deployment, and operations. In traditional software development, quality models such as ISO 25010 provide a widely used structured framework to assess software quality, define quality requirements, and provide a common language for communication with stakeholders. A newer standard, ISO 25059, defines a more specific quality model for AI systems. However, a problem with this standard is that it combines system attributes with ML component attributes, which is not helpful for a model developer, as many system attributes cannot be assessed at the component level. In this paper, we present a quality model for ML components that serves as a guide for requirements elicitation and negotiation and provides a common vocabulary for ML component developers and system stakeholders to agree on and define system-derived requirements and focus their testing efforts accordingly. The quality model was validated through a survey in which the participants agreed with its relevance and value. The quality model has been successfully integrated into an open-source tool for ML component testing and evaluation demonstrating its practical application.
Reslicing Ultrasound Images for Data Augmentation and Vessel Reconstruction
Jan 18, 2023



Robot-guided catheter insertion has the potential to deliver urgent medical care in situations where medical personnel are unavailable. However, this technique requires accurate and reliable segmentation of anatomical landmarks in the body. For the ultrasound imaging modality, obtaining large amounts of training data for a segmentation model is time-consuming and expensive. This paper introduces RESUS (RESlicing of UltraSound Images), a weak supervision data augmentation technique for ultrasound images based on slicing reconstructed 3D volumes from tracked 2D images. This technique allows us to generate views which cannot be easily obtained in vivo due to physical constraints of ultrasound imaging, and use these augmented ultrasound images to train a semantic segmentation model. We demonstrate that RESUS achieves statistically significant improvement over training with non-augmented images and highlight qualitative improvements through vessel reconstruction.
Provably Robust Model-Centric Explanations for Critical Decision-Making
Oct 26, 2021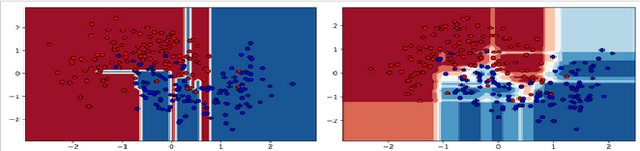


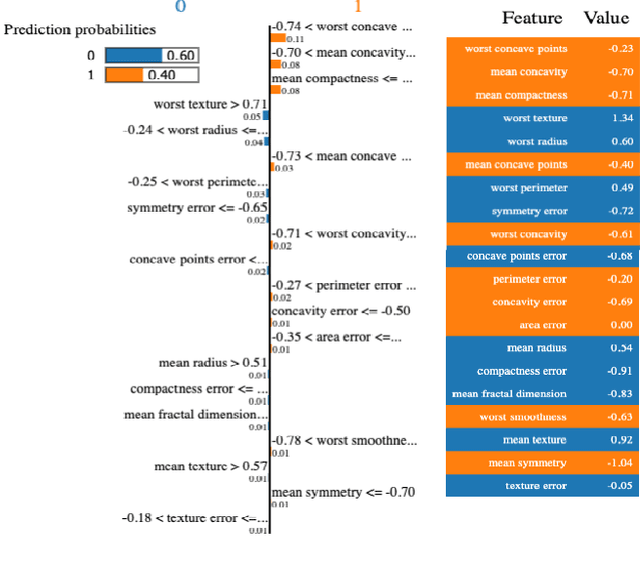
We recommend using a model-centric, Boolean Satisfiability (SAT) formalism to obtain useful explanations of trained model behavior, different and complementary to what can be gleaned from LIME and SHAP, popular data-centric explanation tools in Artificial Intelligence (AI). We compare and contrast these methods, and show that data-centric methods may yield brittle explanations of limited practical utility. The model-centric framework, however, can offer actionable insights into risks of using AI models in practice. For critical applications of AI, split-second decision making is best informed by robust explanations that are invariant to properties of data, the capability offered by model-centric frameworks.