 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly-Supervised Semantic Segmentation by Learning Label Uncertainty
Oct 12, 2021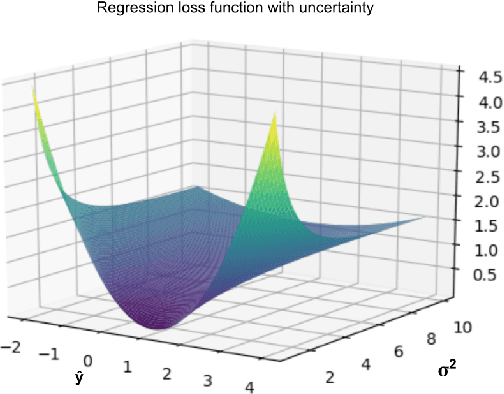
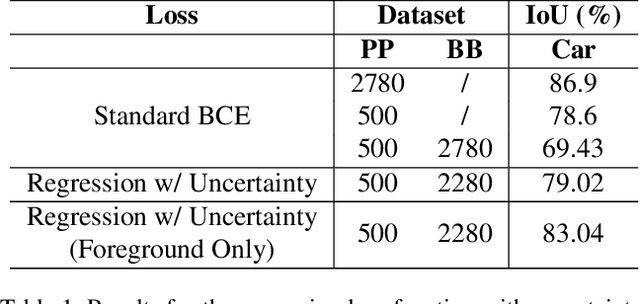
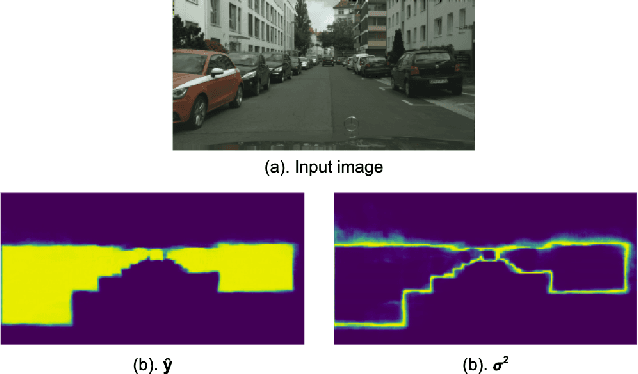
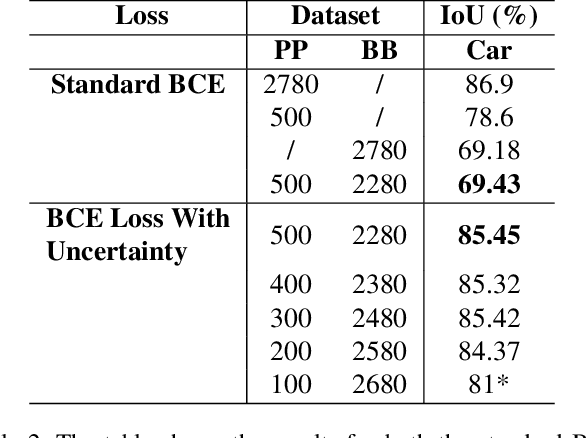
Since the rise of deep learning, many computer vision tasks have seen significant advancements. However, the downside of deep learning is that it is very data-hungry. Especially for segmentation problems, training a deep neural net requires dense supervision in the form of pixel-perfect image labels, which are very costly. In this paper, we present a new loss function to train a segmentation network with only a small subset of pixel-perfect labels, but take the advantage of weakly-annotated training samples in the form of cheap bounding-box labels. Unlike recent works which make use of box-to-mask proposal generators, our loss trains the network to learn a label uncertainty within the bounding-box, which can be leveraged to perform online bootstrapping (i.e. transforming the boxes to segmentation masks), while training the network. We evaluated our method on binary segmentation tasks, as well as a multi-class segmentation task (CityScapes vehicles and persons). We trained each task on a dataset comprised of only 18% pixel-perfect and 82% bounding-box labels, and compared the results to a baseline model trained on a completely pixel-perfect dataset. For the binary segmentation tasks, our method achieves an IoU score which is ~98.33% as good as our baseline model, while for the multi-class task, our method is 97.12% as good as our baseline model (77.5 vs. 79.8 mIoU).
Feed-Forward On-Edge Fine-tuning Using Static Synthetic Gradient Modules
Sep 21, 2020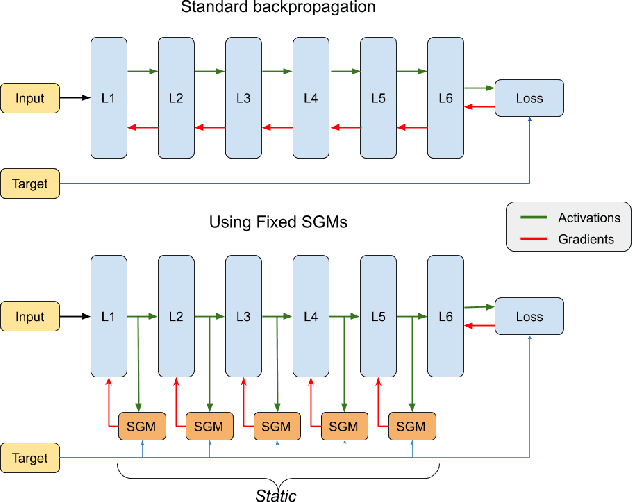
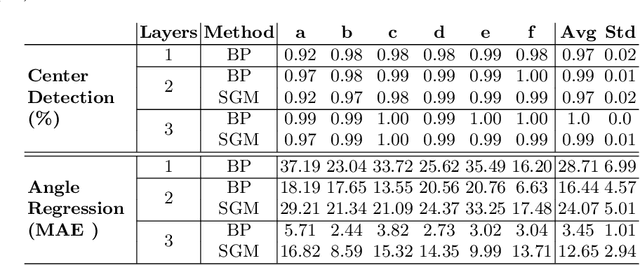
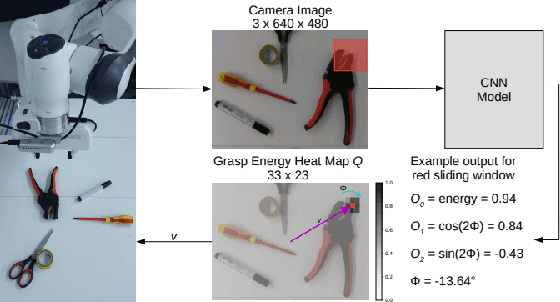
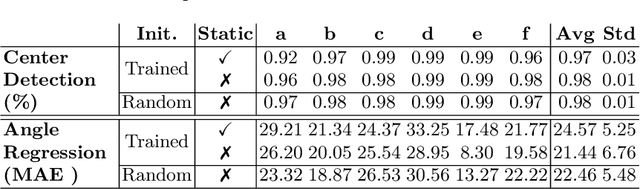
Training deep learning models on embedded devices is typically avoided since this requires more memory, computation and power over inference. In this work, we focus on lowering the amount of memory needed for storing all activations, which are required during the backward pass to compute the gradients. Instead, during the forward pass, static Synthetic Gradient Modules (SGMs) predict gradients for each layer. This allows training the model in a feed-forward manner without having to store all activations. We tested our method on a robot grasping scenario where a robot needs to learn to grasp new objects given only a single demonstration. By first training the SGMs in a meta-learning manner on a set of common objects, during fine-tuning, the SGMs provided the model with accurate gradients to successfully learn to grasp new objects. We have shown that our method has comparable results to using standard backpropagation.