 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEndoDepth: A Benchmark for Assessing Robustness in Endoscopic Depth Prediction
Sep 30, 2024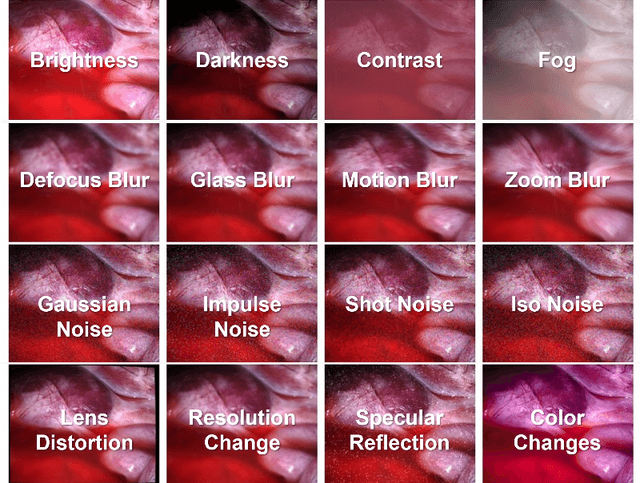
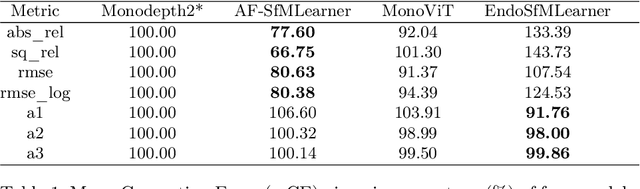
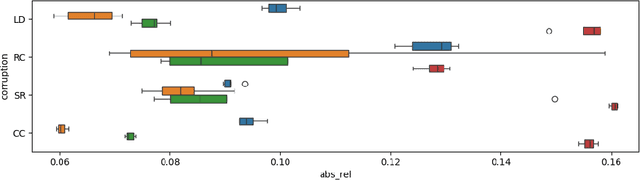

Accurate depth estimation in endoscopy is vital for successfully implementing computer vision pipelines for various medical procedures and CAD tools. In this paper, we present the EndoDepth benchmark, an evaluation framework designed to assess the robustness of monocular depth prediction models in endoscopic scenarios. Unlike traditional datasets, the EndoDepth benchmark incorporates common challenges encountered during endoscopic procedures. We present an evaluation approach that is consistent and specifically designed to evaluate the robustness performance of the model in endoscopic scenarios. Among these is a novel composite metric called the mean Depth Estimation Robustness Score (mDERS), which offers an in-depth evaluation of a model's accuracy against errors brought on by endoscopic image corruptions. Moreover, we present SCARED-C, a new dataset designed specifically to assess endoscopy robustness. Through extensive experimentation, we evaluate state-of-the-art depth prediction architectures on the EndoDepth benchmark, revealing their strengths and weaknesses in handling endoscopic challenging imaging artifacts. Our results demonstrate the importance of specialized techniques for accurate depth estimation in endoscopy and provide valuable insights for future research directions.
Deep learning-based image exposure enhancement as a pre-processing for an accurate 3D colon surface reconstruction
Apr 14, 2023



This contribution shows how an appropriate image pre-processing can improve a deep-learning based 3D reconstruction of colon parts. The assumption is that, rather than global image illumination corrections, local under- and over-exposures should be corrected in colonoscopy. An overview of the pipeline including the image exposure correction and a RNN-SLAM is first given. Then, this paper quantifies the reconstruction accuracy of the endoscope trajectory in the colon with and without appropriate illumination correction
Multi-Scale Structural-aware Exposure Correction for Endoscopic Imaging
Oct 26, 2022



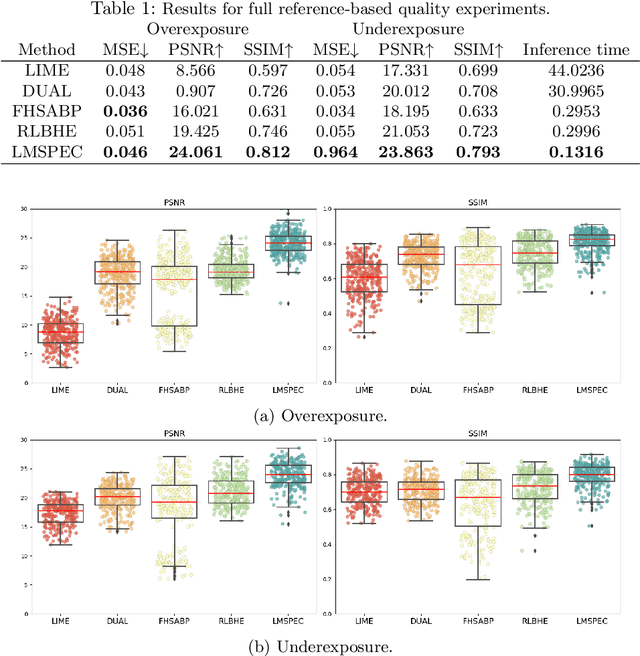
Endoscopy is the most widely used imaging technique for the diagnosis of cancerous lesions in hollow organs. However, endoscopic images are often affected by illumination artefacts: image parts may be over- or underexposed according to the light source pose and the tissue orientation. These artifacts have a strong negative impact on the performance of computer vision or AI-based diagnosis tools. Although endoscopic image enhancement methods are greatly required, little effort has been devoted to over- and under-exposition enhancement in real-time. This contribution presents an extension to the objective function of LMSPEC, a method originally introduced to enhance images from natural scenes. It is used here for the exposure correction in endoscopic imaging and the preservation of structural information. To the best of our knowledge, this contribution is the first one that addresses the enhancement of endoscopic images using deep learning (DL) methods. Tested on the Endo4IE dataset, the proposed implementation has yielded a significant improvement over LMSPEC reaching a SSIM increase of 4.40% and 4.21% for over- and underexposed images, respectively.
A Novel Hybrid Endoscopic Dataset for Evaluating Machine Learning-based Photometric Image Enhancement Models
Jul 06, 2022
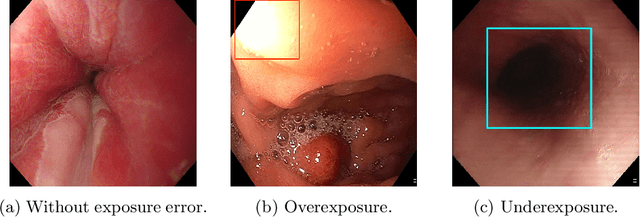
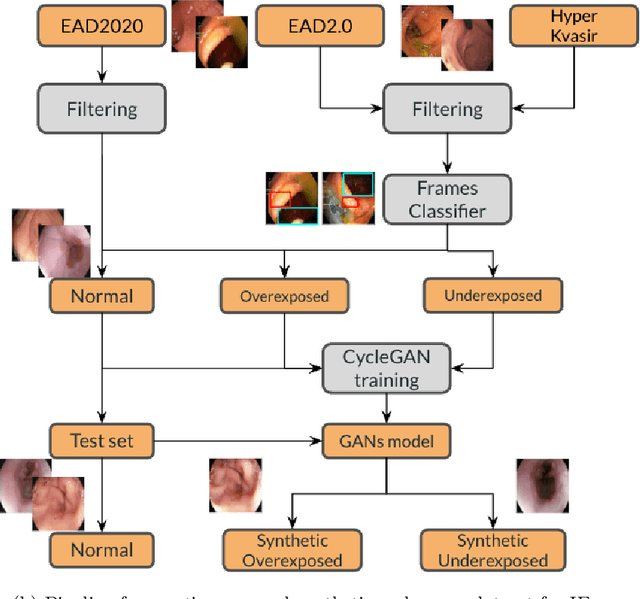
Endoscopy is the most widely used medical technique for cancer and polyp detection inside hollow organs. However, images acquired by an endoscope are frequently affected by illumination artefacts due to the enlightenment source orientation. There exist two major issues when the endoscope's light source pose suddenly changes: overexposed and underexposed tissue areas are produced. These two scenarios can result in misdiagnosis due to the lack of information in the affected zones or hamper the performance of various computer vision methods (e.g., SLAM, structure from motion, optical flow) used during the non invasive examination. The aim of this work is two-fold: i) to introduce a new synthetically generated data-set generated by a generative adversarial techniques and ii) and to explore both shallow based and deep learning-based image-enhancement methods in overexposed and underexposed lighting conditions. Best quantitative results (i.e., metric based results), were obtained by the deep-learnnig-based LMSPEC method,besides a running time around 7.6 fps)