 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Guaranteed Optimal Robust Explanations for NLP Models
May 14, 2021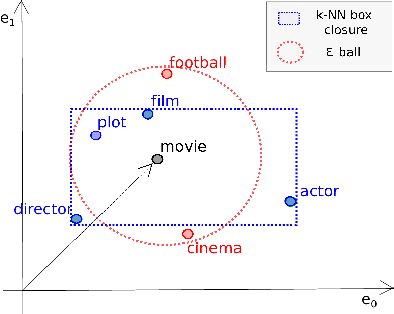
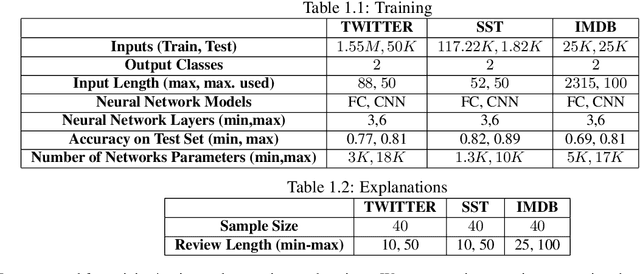
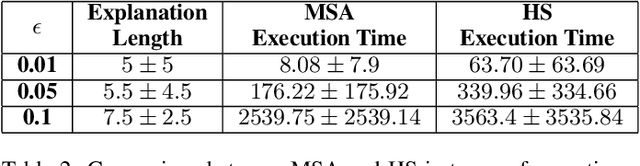

We build on abduction-based explanations for ma-chine learning and develop a method for computing local explanations for neural network models in natural language processing (NLP). Our explanations comprise a subset of the words of the in-put text that satisfies two key features: optimality w.r.t. a user-defined cost function, such as the length of explanation, and robustness, in that they ensure prediction invariance for any bounded perturbation in the embedding space of the left out words. We present two solution algorithms, respectively based on implicit hitting sets and maximum universal subsets, introducing a number of algorithmic improvements to speed up convergence of hard instances. We show how our method can be con-figured with different perturbation sets in the em-bedded space and used to detect bias in predictions by enforcing include/exclude constraints on biased terms, as well as to enhance existing heuristic-based NLP explanation frameworks such as Anchors. We evaluate our framework on three widely used sentiment analysis tasks and texts of up to100words from SST, Twitter and IMDB datasets,demonstrating the effectiveness of the derived explanations.
* 13 pages (8+5 Appendix). Accepted as long-paper at IJCAI 2021
Uncertainty Quantification with Statistical Guarantees in End-to-End Autonomous Driving Control
Sep 21, 2019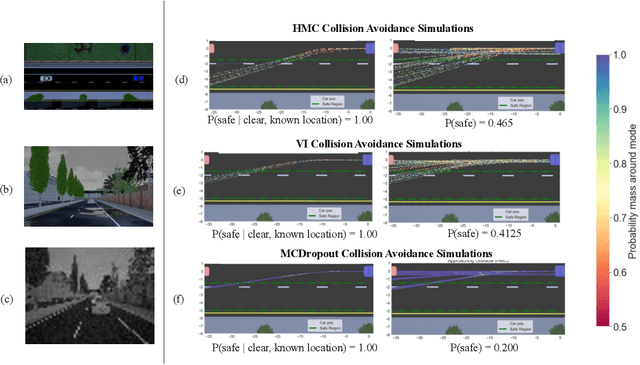
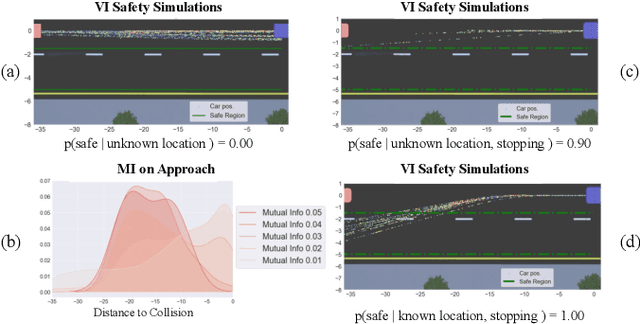
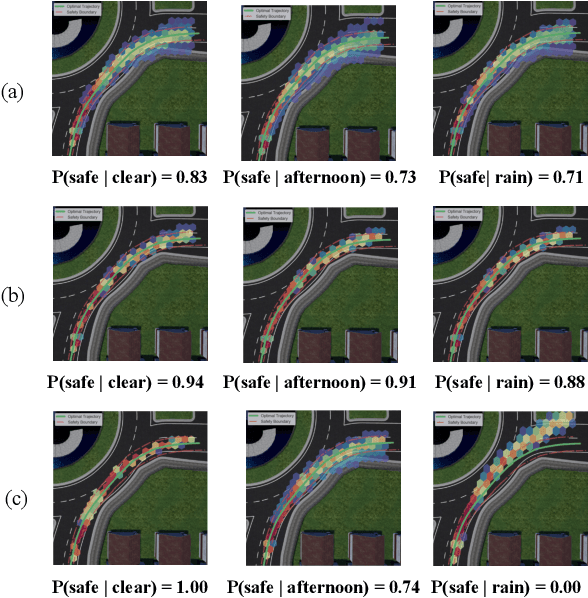
Deep neural network controllers for autonomous driving have recently benefited from significant performance improvements, and have begun deployment in the real world. Prior to their widespread adoption, safety guarantees are needed on the controller behaviour that properly take account of the uncertainty within the model as well as sensor noise. Bayesian neural networks, which assume a prior over the weights, have been shown capable of producing such uncertainty measures, but properties surrounding their safety have not yet been quantified for use in autonomous driving scenarios. In this paper, we develop a framework based on a state-of-the-art simulator for evaluating end-to-end Bayesian controllers. In addition to computing pointwise uncertainty measures that can be computed in real time and with statistical guarantees, we also provide a method for estimating the probability that, given a scenario, the controller keeps the car safe within a finite horizon. We experimentally evaluate the quality of uncertainty computation by several Bayesian inference methods in different scenarios and show how the uncertainty measures can be combined and calibrated for use in collision avoidance. Our results suggest that uncertainty estimates can greatly aid decision making in autonomous driving.
Evaluating Uncertainty Quantification in End-to-End Autonomous Driving Control
Nov 16, 2018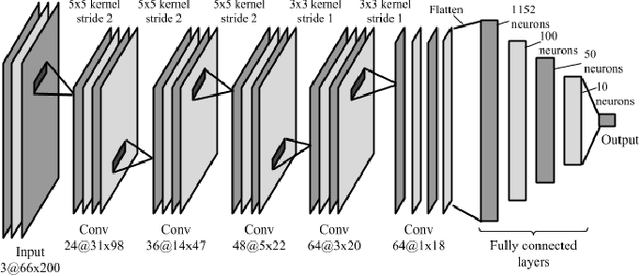
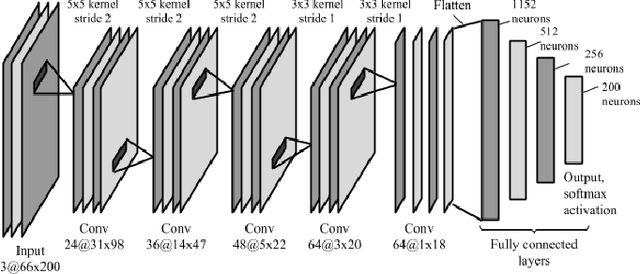

A rise in popularity of Deep Neural Networks (DNNs), attributed to more powerful GPUs and widely available datasets, has seen them being increasingly used within safety-critical domains. One such domain, self-driving, has benefited from significant performance improvements, with millions of miles having been driven with no human intervention. Despite this, crashes and erroneous behaviours still occur, in part due to the complexity of verifying the correctness of DNNs and a lack of safety guarantees. In this paper, we demonstrate how quantitative measures of uncertainty can be extracted in real-time, and their quality evaluated in end-to-end controllers for self-driving cars. To this end we utilise a recent method for gathering approximate uncertainty information from DNNs without changing the network's architecture. We propose evaluation techniques for the uncertainty on two separate architectures which use the uncertainty to predict crashes up to five seconds in advance. We find that mutual information, a measure of uncertainty in classification networks, is a promising indicator of forthcoming crashes.