 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Gröbner Bases of (Universal) Multiview Ideals
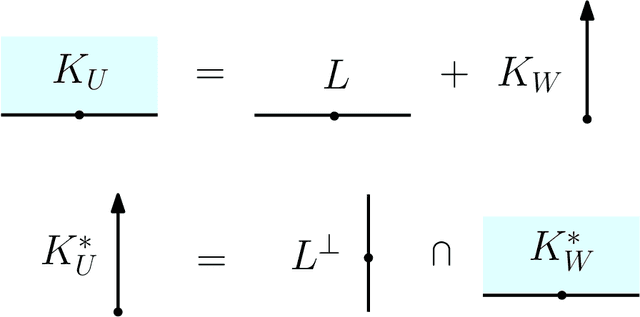
Sep 15, 2025Multiview ideals arise from the geometry of image formation in pinhole cameras, and universal multiview ideals are their analogs for unknown cameras. We prove that a natural collection of polynomials form a universal Gr\"obner basis for both types of ideals using a criterion introduced by Huang and Larson, and include a proof of their criterion in our setting. Symmetry reduction and induction enable the method to be deployed on an infinite family of ideals. We also give an explicit description of the matroids on which the methodology depends, in the context of multiview ideals.
Invariant Kernels: Rank Stabilization and Generalization Across Dimensions
Feb 03, 2025Symmetry arises often when learning from high dimensional data. For example, data sets consisting of point clouds, graphs, and unordered sets appear routinely in contemporary applications, and exhibit rich underlying symmetries. Understanding the benefits of symmetry on the statistical and numerical efficiency of learning algorithms is an active area of research. In this work, we show that symmetry has a pronounced impact on the rank of kernel matrices. Specifically, we compute the rank of a polynomial kernel of fixed degree that is invariant under various groups acting independently on its two arguments. In concrete circumstances, including the three aforementioned examples, symmetry dramatically decreases the rank making it independent of the data dimension. In such settings, we show that a simple regression procedure is minimax optimal for estimating an invariant polynomial from finitely many samples drawn across different dimensions. We complete the paper with numerical experiments that illustrate our findings.
Existence of Two View Chiral Reconstructions
Nov 20, 2020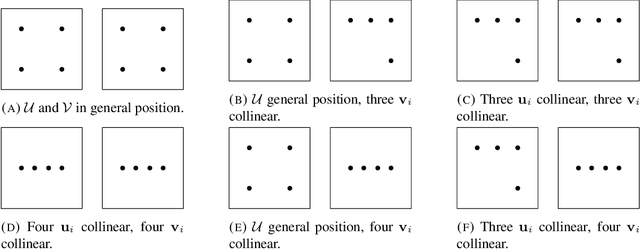

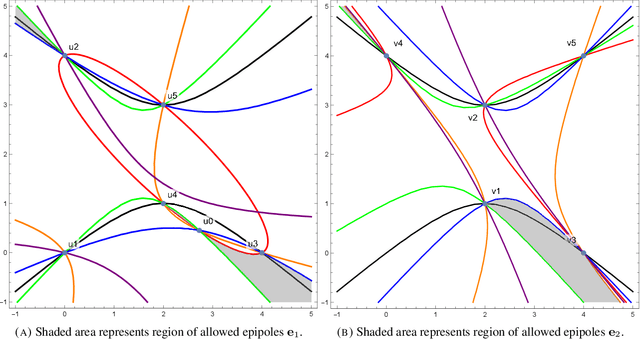
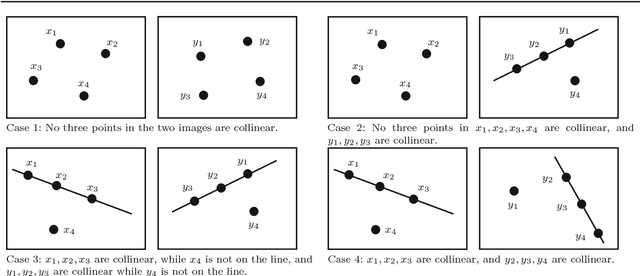
A fundamental question in computer vision is whether a set of point pairs is the image of a scene that lies in front of two cameras. Such a scene and the cameras together are known as a chiral reconstruction of the point pairs. In this paper we provide a complete classification of k point pairs for which a chiral reconstruction exists. The existence of chiral reconstructions is equivalent to the non-emptiness of certain semialgebraic sets. For up to three point pairs, we prove that a chiral reconstruction always exists while the set of five or more point pairs that do not have a chiral reconstruction is Zariski-dense. We show that for five generic point pairs, the chiral region is bounded by line segments in a Schl\"afli double six on a cubic surface with 27 real lines. Four point pairs have a chiral reconstruction unless they belong to two non-generic combinatorial types, in which case they may or may not.
Multiview Chirality
Mar 19, 2020
Given an arrangement of cameras $\mathcal{A} = \{A_1,\dots, A_m\}$, the chiral domain of $\mathcal{A}$ is the subset of $\mathbb{P}^3$ that lies in front it. It is a generalization of the classical definition of chirality. We give an algebraic description of this set and use it to generalize Hartley's theory of chiral reconstruction to $m \ge 2$ views and derive a chiral version of Triggs' Joint Image.
On the Existence of Epipolar Matrices
Oct 06, 2015
This paper considers the foundational question of the existence of a fundamental (resp. essential) matrix given $m$ point correspondences in two views. We present a complete answer for the existence of fundamental matrices for any value of $m$. Using examples we disprove the widely held beliefs that fundamental matrices always exist whenever $m \leq 7$. At the same time, we prove that they exist unconditionally when $m \leq 5$. Under a mild genericity condition, we show that an essential matrix always exists when $m \leq 4$. We also characterize the six and seven point configurations in two views for which all matrices satisfying the epipolar constraint have rank at most one.
Certifying the Existence of Epipolar Matrices
Jul 21, 2014Given a set of point correspondences in two images, the existence of a fundamental matrix is a necessary condition for the points to be the images of a 3-dimensional scene imaged with two pinhole cameras. If the camera calibration is known then one requires the existence of an essential matrix. We present an efficient algorithm, using exact linear algebra, for testing the existence of a fundamental matrix. The input is any number of point correspondences. For essential matrices, we characterize the solvability of the Demazure polynomials. In both scenarios, we determine which linear subspaces intersect a fixed set defined by non-linear polynomials. The conditions we derive are polynomials stated purely in terms of image coordinates. They represent a new class of two-view invariants, free of fundamental (resp.~essential)~matrices.