 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Control under Uncertainty with Data-Based Iterative Linear Quadratic Regulator
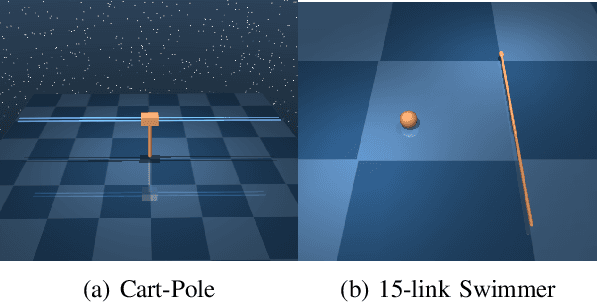
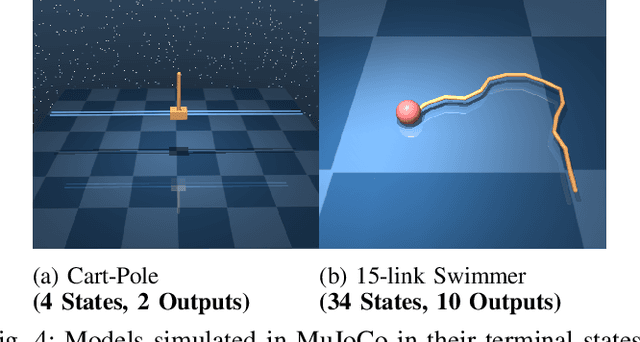
Nov 08, 2023This paper studies the learning-to-control problem under process and sensing uncertainties for dynamical systems. In our previous work, we developed a data-based generalization of the iterative linear quadratic regulator (iLQR) to design closed-loop feedback control for high-dimensional dynamical systems with partial state observation. This method required perfect simulation rollouts which are not realistic in real applications. In this work, we briefly introduce this method and explore its efficacy under process and sensing uncertainties. We prove that in the fully observed case where the system dynamics are corrupted with noise but the measurements are perfect, it still converges to the global minimum. However, in the partially observed case where both process and measurement noise exist in the system, this method converges to a biased "optimum". Thus multiple rollouts need to be averaged to retrieve the true optimum. The analysis is verified in two nonlinear robotic examples simulated in the above cases.
A Data-Driven Modeling and Control Framework for Physics-Based Building Emulators
Jan 31, 2023



We present a data-driven modeling and control framework for physics-based building emulators. Our approach comprises: (a) Offline training of differentiable surrogate models that speed up model evaluations, provide cheap gradients, and have good predictive accuracy for the receding horizon in Model Predictive Control (MPC) and (b) Formulating and solving nonlinear building HVAC MPC problems. We extensively verify the modeling and control performance using multiple surrogate models and optimization frameworks for different available test cases in the Building Optimization Testing Framework (BOPTEST). The framework is compatible with other modeling techniques and customizable with different control formulations. The modularity makes the approach future-proof for test cases currently in development for physics-based building emulators and provides a path toward prototyping predictive controllers in large buildings.
Partially-Observed Decoupled Data-based Control (POD2C) for Complex Robotic Systems
Jul 16, 2021
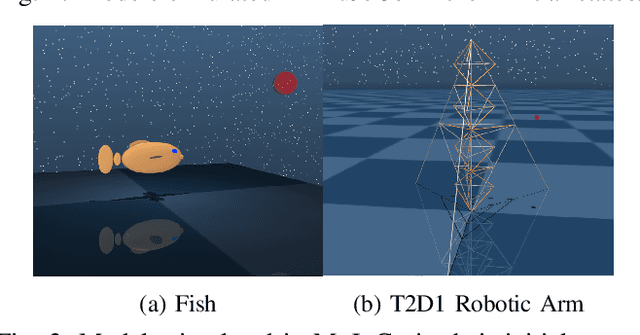
This paper develops a systematic data-based approach to the closed-loop feedback control of high-dimensional robotic systems using only partial state observation. We first develop a model-free generalization of the iterative Linear Quadratic Regulator (iLQR) to partially-observed systems using an Autoregressive Moving Average (ARMA) model, that is generated using only the input-output data. The ARMA model results in an information state, which has dimension less than or equal to the underlying actual state dimension. This open-loop trajectory optimization solution is then used to design a local feedback control law, and the composite law then provides a solution to the partially observed feedback design problem. The efficacy of the developed method is shown by controlling complex high dimensional nonlinear robotic systems in the presence of model and sensing uncertainty and for which analytical models are either unavailable or inaccurate.
Model-based Shape Control of Tensegrity Robotic Systems
Nov 07, 2020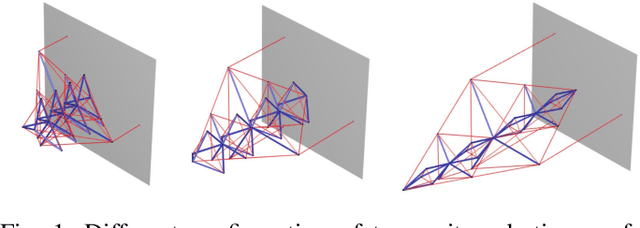
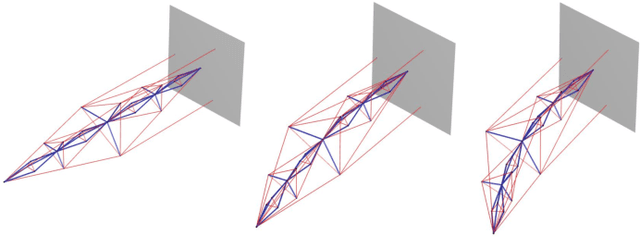

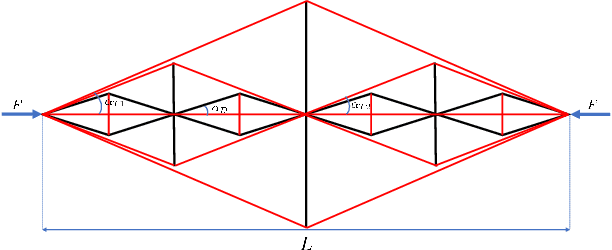
This paper proposes a model-based approach to control the shape of a tensegrity system by driving its node position locations. The nonlinear dynamics of the tensegrity system is used to regulate position, velocity, and acceleration to the specified reference trajectory. State feedback control design is used to obtain the solution for the control variable as a linear programming problem. Shape control for the gyroscopic tensegrity systems is discussed, and it is observed that these systems increase the reachable space for the structure by providing independent control over certain rotational degrees of freedom. Disturbance rejection of the tensegrity system is further studied in the paper. A methodology to calculate the control gains to bound the errors for five different types of problems is provided. The formulation uses a Linear Matrix Inequality (LMI) approach to stipulate the desired performance bounds on the error for $\mathcal{H}_\infty$, generalized $\mathcal{H}_2$, LQR, covariance control and stabilizing control problem. A high degree of freedom tensegrity $T_2D_1$ robotic arm is used as an example to show the efficacy of the formulation.