 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Driven Modeling and Control Framework for Physics-Based Building Emulators
Jan 31, 2023



We present a data-driven modeling and control framework for physics-based building emulators. Our approach comprises: (a) Offline training of differentiable surrogate models that speed up model evaluations, provide cheap gradients, and have good predictive accuracy for the receding horizon in Model Predictive Control (MPC) and (b) Formulating and solving nonlinear building HVAC MPC problems. We extensively verify the modeling and control performance using multiple surrogate models and optimization frameworks for different available test cases in the Building Optimization Testing Framework (BOPTEST). The framework is compatible with other modeling techniques and customizable with different control formulations. The modularity makes the approach future-proof for test cases currently in development for physics-based building emulators and provides a path toward prototyping predictive controllers in large buildings.
D2C 2.0: Decoupled Data-Based Approach for Learning to Control Stochastic Nonlinear Systems via Model-Free ILQR
Feb 18, 2020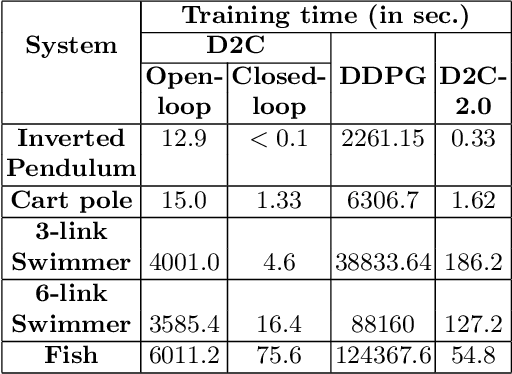


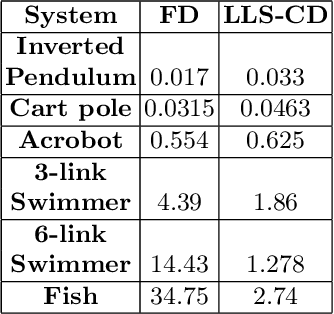
In this paper, we propose a structured linear parameterization of a feedback policy to solve the model-free stochastic optimal control problem. This parametrization is corroborated by a decoupling principle that is shown to be near-optimal under a small noise assumption, both in theory and by empirical analyses. Further, we incorporate a model-free version of the Iterative Linear Quadratic Regulator (ILQR) in a sample-efficient manner into our framework. Simulations on systems over a range of complexities reveal that the resulting algorithm is able to harness the superior second-order convergence properties of ILQR. As a result, it is fast and is scalable to a wide variety of higher dimensional systems. Comparisons are made with a state-of-the-art reinforcement learning algorithm, the Deep Deterministic Policy Gradient (DDPG) technique, in order to demonstrate the significant merits of our approach in terms of training-efficiency.