 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromorphic Readout for Hadron Calorimeters
Feb 18, 2025We simulate hadrons impinging on a homogeneous lead-tungstate (PbWO4) calorimeter to investigate how the resulting light yield and its temporal structure, as detected by an array of light-sensitive sensors, can be processed by a neuromorphic computing system. Our model encodes temporal photon distributions as spike trains and employs a fully connected spiking neural network to estimate the total deposited energy, as well as the position and spatial distribution of the light emissions within the sensitive material. The extracted primitives offer valuable topological information about the shower development in the material, achieved without requiring a segmentation of the active medium. A potential nanophotonic implementation using III-V semiconductor nanowires is discussed. It can be both fast and energy efficient.
Constrained Optimization of Charged Particle Tracking with Multi-Agent Reinforcement Learning
Jan 09, 2025



Reinforcement learning demonstrated immense success in modelling complex physics-driven systems, providing end-to-end trainable solutions by interacting with a simulated or real environment, maximizing a scalar reward signal. In this work, we propose, building upon previous work, a multi-agent reinforcement learning approach with assignment constraints for reconstructing particle tracks in pixelated particle detectors. Our approach optimizes collaboratively a parametrized policy, functioning as a heuristic to a multidimensional assignment problem, by jointly minimizing the total amount of particle scattering over the reconstructed tracks in a readout frame. To satisfy constraints, guaranteeing a unique assignment of particle hits, we propose a safety layer solving a linear assignment problem for every joint action. Further, to enforce cost margins, increasing the distance of the local policies predictions to the decision boundaries of the optimizer mappings, we recommend the use of an additional component in the blackbox gradient estimation, forcing the policy to solutions with lower total assignment costs. We empirically show on simulated data, generated for a particle detector developed for proton imaging, the effectiveness of our approach, compared to multiple single- and multi-agent baselines. We further demonstrate the effectiveness of constraints with cost margins for both optimization and generalization, introduced by wider regions with high reconstruction performance as well as reduced predictive instabilities. Our results form the basis for further developments in RL-based tracking, offering both enhanced performance with constrained policies and greater flexibility in optimizing tracking algorithms through the option for individual and team rewards.
Exploring End-to-end Differentiable Neural Charged Particle Tracking -- A Loss Landscape Perspective
Jul 18, 2024
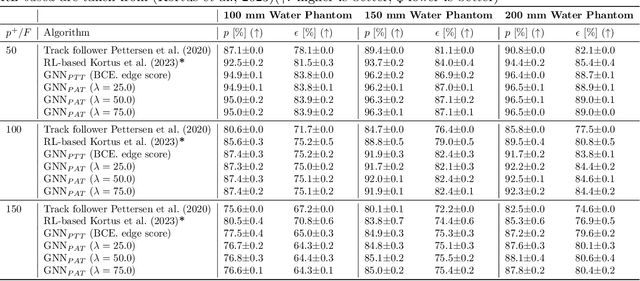
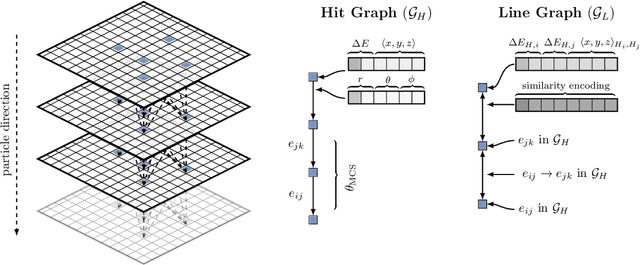
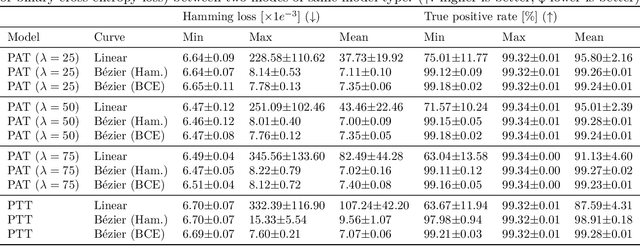
Measurement and analysis of high energetic particles for scientific, medical or industrial applications is a complex procedure, requiring the design of sophisticated detector and data processing systems. The development of adaptive and differentiable software pipelines using a combination of conventional and machine learning algorithms is therefore getting ever more important to optimize and operate the system efficiently while maintaining end-to-end (E2E) differentiability. We propose for the application of charged particle tracking an E2E differentiable decision-focused learning scheme using graph neural networks with combinatorial components solving a linear assignment problem for each detector layer. We demonstrate empirically that including differentiable variations of discrete assignment operations allows for efficient network optimization, working better or on par with approaches that lack E2E differentiability. In additional studies, we dive deeper into the optimization process and provide further insights from a loss landscape perspective. We demonstrate that while both methods converge into similar performing, globally well-connected regions, they suffer under substantial predictive instability across initialization and optimization methods, which can have unpredictable consequences on the performance of downstream tasks such as image reconstruction. We also point out a dependency between the interpolation factor of the gradient estimator and the prediction stability of the model, suggesting the choice of sufficiently small values. Given the strong global connectivity of learned solutions and the excellent training performance, we argue that E2E differentiability provides, besides the general availability of gradient information, an important tool for robust particle tracking to mitigate prediction instabilities by favoring solutions that perform well on downstream tasks.