 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Modeling of a Smart Torque-Adjustable Rotary Electroadhesive Clutch for Application in Human-Robot Interaction
Oct 16, 2022



The increasing need for sharing workspace and interactive physical tasks between robots and humans has raised concerns regarding safety of such operations. In this regard, controllable clutches have shown great potential for addressing important safety concerns at the hardware level by separating the high-impedance actuator from the end effector by providing the power transfer from electromagnetic source to the human. However, the existing clutches suffer from high power consumption and large-weight, which make them undesirable from the design point of view. In this paper, for the first time, the design and development of a novel, lightweight, and low-power torque-adjustable rotary clutch using electroadhesive materials is presented. The performance of three different pairs of clutch plates is investigated in the context of the smoothness and quality of output torque. The performance degradation issue due to the polarization of the insulator is addressed through the utilization of an alternating current waveform activation signal. Moreover, the effect of the activation frequency on the output torque and power consumption of the clutch is investigated. Finally, a time-dependent model for the output torque of the clutch is presented, and the performance of the clutch was evaluated through experiments, including physical human-robot interaction. The proposed clutch offers a torque to power consumption ratio that is six times better than commercial magnetic particle clutches. The proposed clutch presents great potential for developing safe, lightweight, and low-power physical human-robot interaction systems, such as exoskeletons and robotic walkers.
WAKE: Wavelet Decomposition Coupled with Adaptive Kalman Filtering for Pathological Tremor Extraction
Oct 10, 2018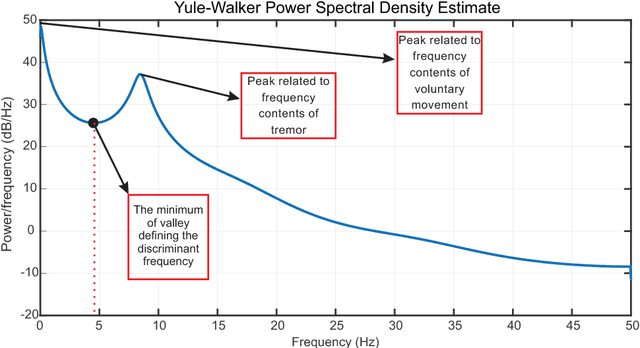
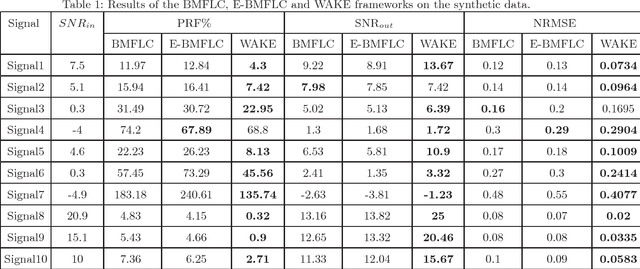

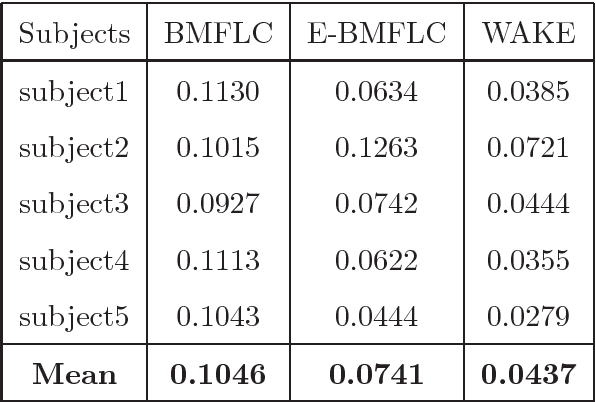
Pathological Hand Tremor (PHT) is among common symptoms of several neurological movement disorders, which can significantly degrade quality of life of affected individuals. Beside pharmaceutical and surgical therapies, mechatronic technologies have been utilized to control PHTs. Most of these technologies function based on estimation, extraction, and characterization of tremor movement signals. Real-time extraction of tremor signal is of paramount importance because of its application in assistive and rehabilitative devices. In this paper, we propose a novel on-line adaptive method which can adjust the hyper-parameters of the filter to the variable characteristics of the tremor. The proposed "WAKE: Wavelet decomposition coupled with Adaptive Kalman filtering technique for pathological tremor Extraction, referred to as the WAKE framework" is composed of a new adaptive Kalman filter and a wavelet transform core to provide indirect prediction of the tremor, one sample ahead of time, to be used for its suppression. In this paper, the design, implementation and evaluation of WAKE are given. The performance is evaluated based on three different datasets, the first one is a synthetic dataset, developed in this work, that simulates hand tremor under ten different conditions. The second and third ones are real datasets recorded from patients with PHTs. The results obtained from the proposed WAKE framework demonstrate significant improvements in the estimation accuracy in comparison with two well regarded techniques in the literature.
Machine Vision System for 3D Plant Phenotyping
Apr 28, 2017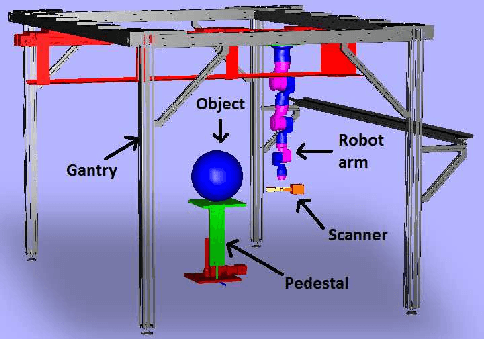

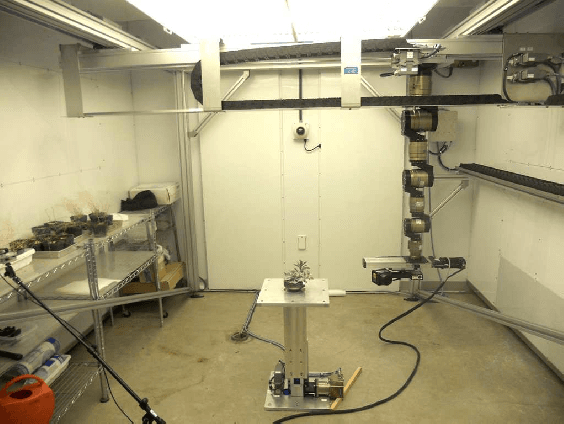
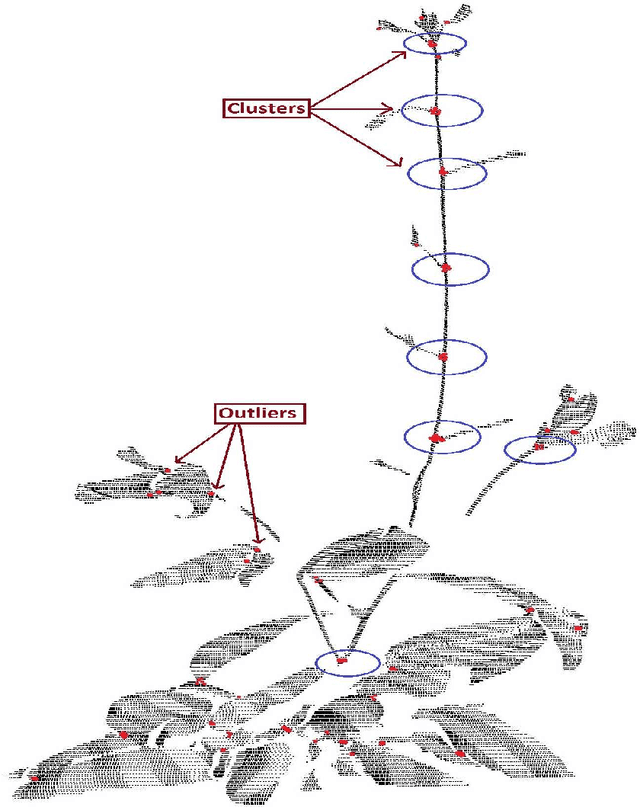
Machine vision for plant phenotyping is an emerging research area for producing high throughput in agriculture and crop science applications. Since 2D based approaches have their inherent limitations, 3D plant analysis is becoming state of the art for current phenotyping technologies. We present an automated system for analyzing plant growth in indoor conditions. A gantry robot system is used to perform scanning tasks in an automated manner throughout the lifetime of the plant. A 3D laser scanner mounted as the robot's payload captures the surface point cloud data of the plant from multiple views. The plant is monitored from the vegetative to reproductive stages in light/dark cycles inside a controllable growth chamber. An efficient 3D reconstruction algorithm is used, by which multiple scans are aligned together to obtain a 3D mesh of the plant, followed by surface area and volume computations. The whole system, including the programmable growth chamber, robot, scanner, data transfer and analysis is fully automated in such a way that a naive user can, in theory, start the system with a mouse click and get back the growth analysis results at the end of the lifetime of the plant with no intermediate intervention. As evidence of its functionality, we show and analyze quantitative results of the rhythmic growth patterns of the dicot Arabidopsis thaliana(L.), and the monocot barley (Hordeum vulgare L.) plants under their diurnal light/dark cycles.