 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePartially Occluded Leaf Recognition via Subgraph Matching and Energy Optimization
Jul 03, 2017



We present an approach to match partially occluded plant leaves with databases of full plant leaves. Although contour based 2D shape matching has been studied extensively in the last couple of decades, matching occluded leaves with full leaf databases is an open and little worked on problem. Classifying occluded plant leaves is even more challenging than full leaf matching because of large variations and complexity of leaf structures. Matching an occluded contour with all the full contours in a database is an NP-hard problem [Su et al. ICCV2015], so our algorithm is necessarily suboptimal.
Machine Vision System for 3D Plant Phenotyping
Apr 28, 2017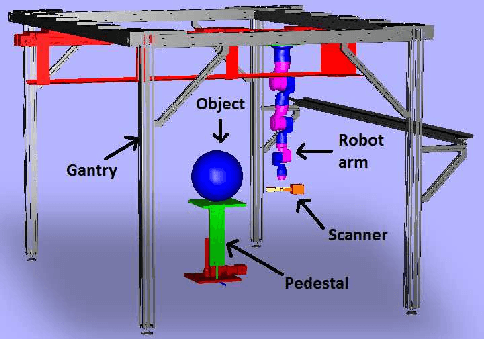

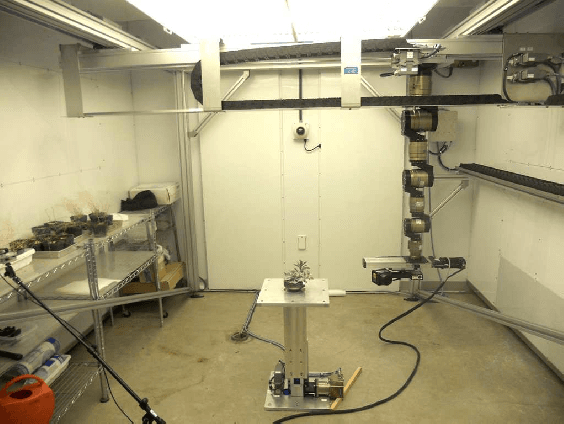
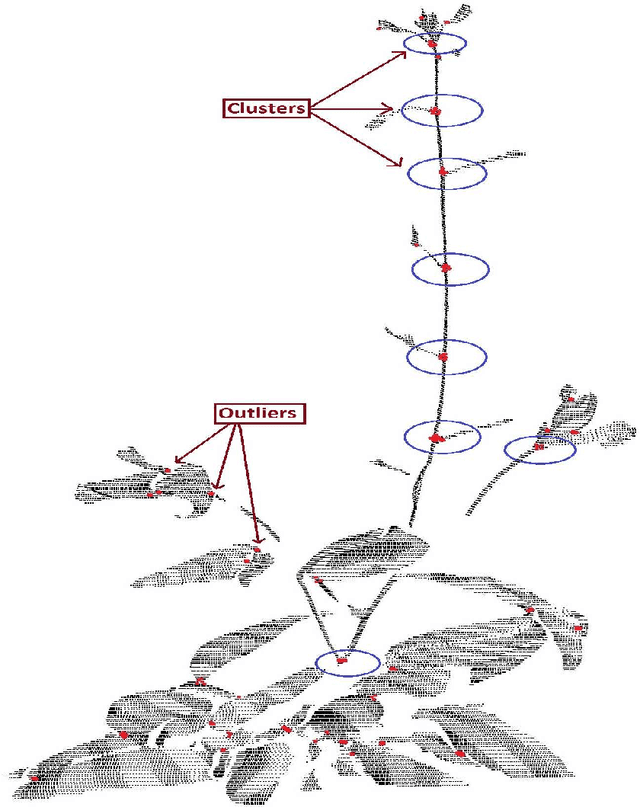
Machine vision for plant phenotyping is an emerging research area for producing high throughput in agriculture and crop science applications. Since 2D based approaches have their inherent limitations, 3D plant analysis is becoming state of the art for current phenotyping technologies. We present an automated system for analyzing plant growth in indoor conditions. A gantry robot system is used to perform scanning tasks in an automated manner throughout the lifetime of the plant. A 3D laser scanner mounted as the robot's payload captures the surface point cloud data of the plant from multiple views. The plant is monitored from the vegetative to reproductive stages in light/dark cycles inside a controllable growth chamber. An efficient 3D reconstruction algorithm is used, by which multiple scans are aligned together to obtain a 3D mesh of the plant, followed by surface area and volume computations. The whole system, including the programmable growth chamber, robot, scanner, data transfer and analysis is fully automated in such a way that a naive user can, in theory, start the system with a mouse click and get back the growth analysis results at the end of the lifetime of the plant with no intermediate intervention. As evidence of its functionality, we show and analyze quantitative results of the rhythmic growth patterns of the dicot Arabidopsis thaliana(L.), and the monocot barley (Hordeum vulgare L.) plants under their diurnal light/dark cycles.
Multiple View Reconstruction of Calibrated Images using Singular Value Decomposition
Nov 02, 2010
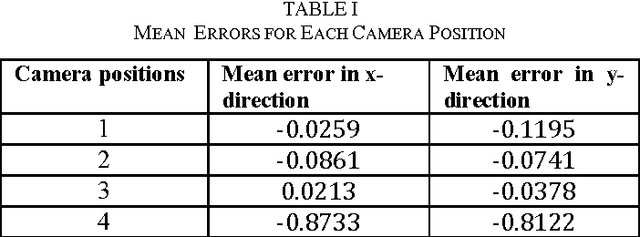
Calibration in a multi camera network has widely been studied for over several years starting from the earlier days of photogrammetry. Many authors have presented several calibration algorithms with their relative advantages and disadvantages. In a stereovision system, multiple view reconstruction is a challenging task. However, the total computational procedure in detail has not been presented before. Here in this work, we are dealing with the problem that, when a world coordinate point is fixed in space, image coordinates of that 3D point vary for different camera positions and orientations. In computer vision aspect, this situation is undesirable. That is, the system has to be designed in such a way that image coordinate of the world coordinate point will be fixed irrespective of the position & orientation of the cameras. We have done it in an elegant fashion. Firstly, camera parameters are calculated in its local coordinate system. Then, we use global coordinate data to transfer all local coordinate data of stereo cameras into same global coordinate system, so that we can register everything into this global coordinate system. After all the transformations, when the image coordinate of the world coordinate point is calculated, it gives same coordinate value for all camera positions & orientations. That is, the whole system is calibrated.