 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Based Deep Reinforcement Learning Aided by Transformers for Multi-Agent Cooperation
Apr 11, 2025Mission planning for a fleet of cooperative autonomous drones in applications that involve serving distributed target points, such as disaster response, environmental monitoring, and surveillance, is challenging, especially under partial observability, limited communication range, and uncertain environments. Traditional path-planning algorithms struggle in these scenarios, particularly when prior information is not available. To address these challenges, we propose a novel framework that integrates Graph Neural Networks (GNNs), Deep Reinforcement Learning (DRL), and transformer-based mechanisms for enhanced multi-agent coordination and collective task execution. Our approach leverages GNNs to model agent-agent and agent-goal interactions through adaptive graph construction, enabling efficient information aggregation and decision-making under constrained communication. A transformer-based message-passing mechanism, augmented with edge-feature-enhanced attention, captures complex interaction patterns, while a Double Deep Q-Network (Double DQN) with prioritized experience replay optimizes agent policies in partially observable environments. This integration is carefully designed to address specific requirements of multi-agent navigation, such as scalability, adaptability, and efficient task execution. Experimental results demonstrate superior performance, with 90% service provisioning and 100% grid coverage (node discovery), while reducing the average steps per episode to 200, compared to 600 for benchmark methods such as particle swarm optimization (PSO), greedy algorithms and DQN.
Enhanced Cooperative Perception for Autonomous Vehicles Using Imperfect Communication
Apr 10, 2024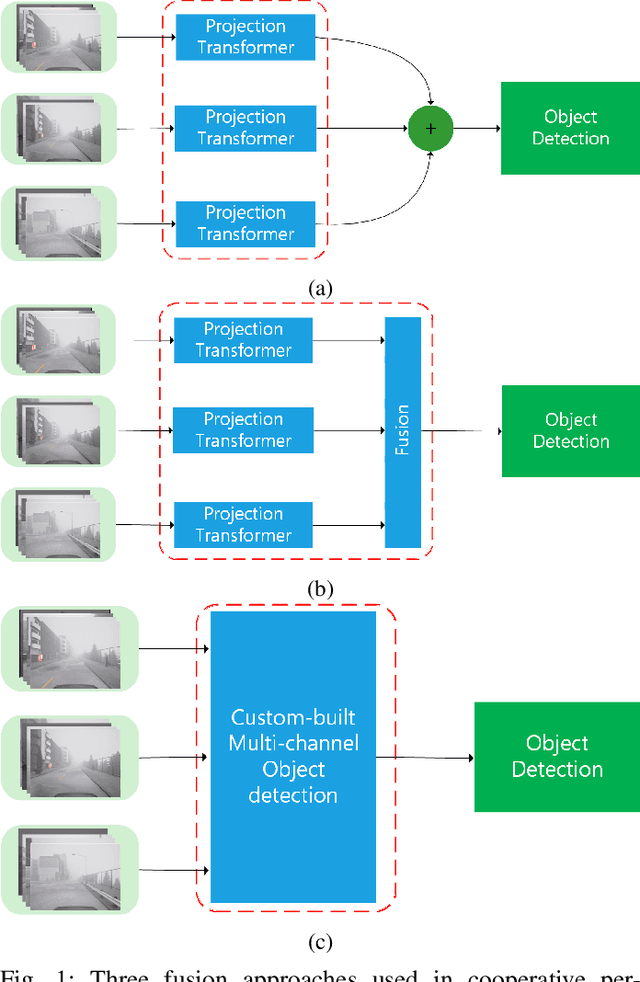
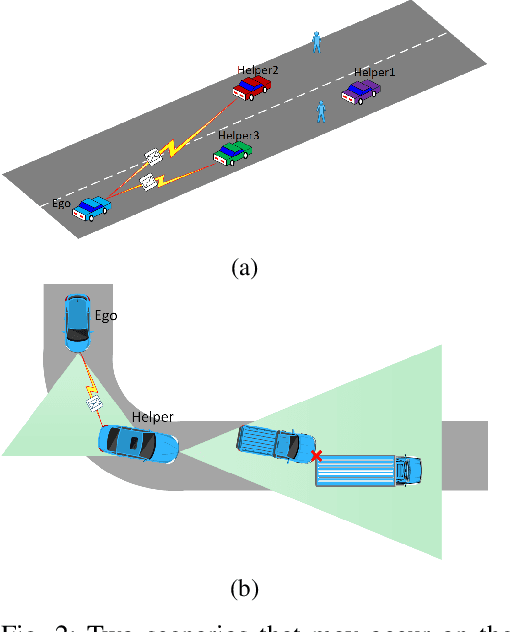
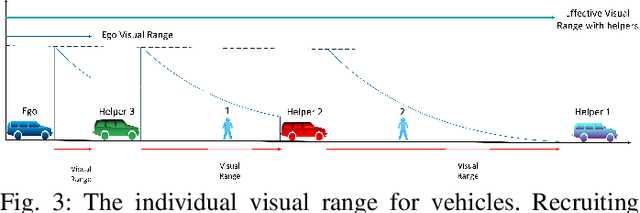
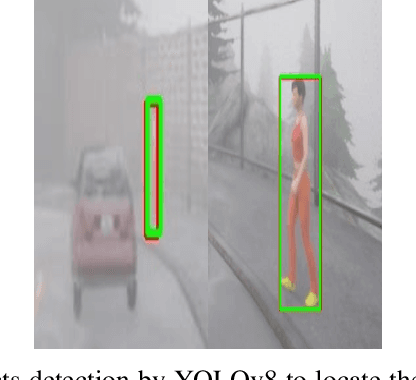
Sharing and joint processing of camera feeds and sensor measurements, known as Cooperative Perception (CP), has emerged as a new technique to achieve higher perception qualities. CP can enhance the safety of Autonomous Vehicles (AVs) where their individual visual perception quality is compromised by adverse weather conditions (haze as foggy weather), low illumination, winding roads, and crowded traffic. To cover the limitations of former methods, in this paper, we propose a novel approach to realize an optimized CP under constrained communications. At the core of our approach is recruiting the best helper from the available list of front vehicles to augment the visual range and enhance the Object Detection (OD) accuracy of the ego vehicle. In this two-step process, we first select the helper vehicles that contribute the most to CP based on their visual range and lowest motion blur. Next, we implement a radio block optimization among the candidate vehicles to further improve communication efficiency. We specifically focus on pedestrian detection as an exemplary scenario. To validate our approach, we used the CARLA simulator to create a dataset of annotated videos for different driving scenarios where pedestrian detection is challenging for an AV with compromised vision. Our results demonstrate the efficacy of our two-step optimization process in improving the overall performance of cooperative perception in challenging scenarios, substantially improving driving safety under adverse conditions. Finally, we note that the networking assumptions are adopted from LTE Release 14 Mode 4 side-link communication, commonly used for Vehicle-to-Vehicle (V2V) communication. Nonetheless, our method is flexible and applicable to arbitrary V2V communications.
Learning on Bandwidth Constrained Multi-Source Data with MIMO-inspired DPP MAP Inference
Jun 04, 2023This paper proposes a distributed version of Determinant Point Processing (DPP) inference to enhance multi-source data diversification under limited communication bandwidth. DPP is a popular probabilistic approach that improves data diversity by enforcing the repulsion of elements in the selected subsets. The well-studied Maximum A Posteriori (MAP) inference in DPP aims to identify the subset with the highest diversity quantified by DPP. However, this approach is limited by the presumption that all data samples are available at one point, which hinders its applicability to real-world applications such as traffic datasets where data samples are distributed across sources and communication between them is band-limited. Inspired by the techniques used in Multiple-Input Multiple-Output (MIMO) communication systems, we propose a strategy for performing MAP inference among distributed sources. Specifically, we show that a lower bound of the diversity-maximized distributed sample selection problem can be treated as a power allocation problem in MIMO systems. A determinant-preserved sparse representation of selected samples is used to perform sample precoding in local sources to be processed by DPP. Our method does not require raw data exchange among sources, but rather a band-limited feedback channel to send lightweight diversity measures, analogous to the CSI message in MIMO systems, from the center to data sources. The experiments show that our scalable approach can outperform baseline methods, including random selection, uninformed individual DPP with no feedback, and DPP with SVD-based feedback, in both i.i.d and non-i.i.d setups. Specifically, it achieves 1 to 6 log-difference diversity gain in the latent representation of CIFAR-10, CIFAR-100, StanfordCars, and GTSRB datasets.
RD-DPP: Rate-Distortion Theory Meets Determinantal Point Process to Diversify Learning Data Samples
Apr 09, 2023
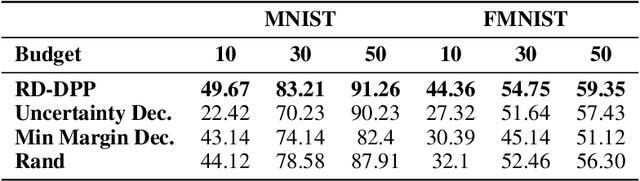

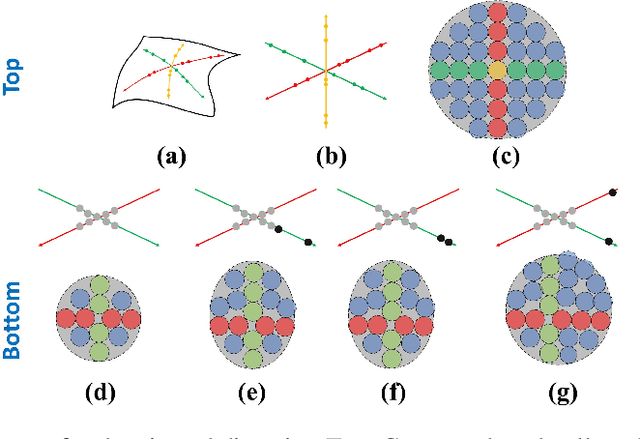
In some practical learning tasks, such as traffic video analysis, the number of available training samples is restricted by different factors, such as limited communication bandwidth and computation power; therefore, it is imperative to select diverse data samples that contribute the most to the quality of the learning system. One popular approach to selecting diverse samples is Determinantal Point Process (DPP). However, it suffers from a few known drawbacks, such as restriction of the number of samples to the rank of the similarity matrix, and not being customizable for specific learning tasks (e.g., multi-level classification tasks). In this paper, we propose a new way of measuring task-oriented diversity based on the Rate-Distortion (RD) theory, appropriate for multi-level classification. To this end, we establish a fundamental relationship between DPP and RD theory, which led to designing RD-DPP, an RD-based value function to evaluate the diversity gain of data samples. We also observe that the upper bound of the diversity of data selected by DPP has a universal trend of phase transition that quickly approaches its maximum point, then slowly converges to its final limits, meaning that DPP is beneficial only at the beginning of sample accumulation. We use this fact to design a bi-modal approach for sequential data selection.
Fast Key Points Detection and Matching for Tree-Structured Images
Nov 15, 2022This paper offers a new authentication algorithm based on image matching of nano-resolution visual identifiers with tree-shaped patterns. The algorithm includes image-to-tree conversion by greedy extraction of the fractal pattern skeleton along with a custom-built graph matching algorithm that is robust against imaging artifacts such as scaling, rotation, scratch, and illumination change. The proposed algorithm is applicable to a variety of tree-structured image matching, but our focus is on dendrites, recently-developed visual identifiers. Dendrites are entropy rich and unclonable with existing 2D and 3D printers due to their natural randomness, nano-resolution granularity, and 3D facets, making them an appropriate choice for security applications such as supply chain trace and tracking. The proposed algorithm improves upon graph matching with standard image descriptors. For instance, image inconsistency due to the camera sensor noise may cause unexpected feature extraction leading to inaccurate tree conversion and authentication failure. Also, previous tree extraction algorithms are prohibitively slow hindering their scalability to large systems. In this paper, we fix the current issues of [1] and accelerate the key points extraction up to 10-times faster by implementing a new skeleton extraction method, a new key points searching algorithm, as well as an optimized key point matching algorithm. Using minimum enclosing circle and center points, make the algorithm robust to the choice of pattern shape. In contrast to [1] our algorithm handles general graphs with loop connections, therefore is applicable to a wider range of applications such as transportation map analysis, fingerprints, and retina vessel imaging.