 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Adaptive Beam Search Planning for Transformer-Based Reinforcement Learning Control of UAVs with Overhead Manipulators under Flight Disturbances
Mar 27, 2026Drones equipped with overhead manipulators offer unique capabilities for inspection, maintenance, and contact-based interaction. However, the motion of the drone and its manipulator is tightly linked, and even small attitude changes caused by wind or control imperfections shift the end-effector away from its intended path. This coupling makes reliable tracking difficult and also limits the direct use of learning-based arm controllers that were originally designed for fixed-base robots. These effects appear consistently in our tests whenever the UAV body experiences drift or rapid attitude corrections. To address this behavior, we develop a reinforcement-learning (RL) framework with a transformer-based double deep Q learning (DDQN), with the core idea of using an adaptive beam-search planner that applies a short-horizon beam search over candidate control sequences using the learned critic as the forward estimator. This allows the controller to anticipate the end-effector's motion through simulated rollouts rather than executing those actions directly on the actual model, realizing a software-in-the-loop (SITL) approach. The lookahead relies on value estimates from a Transformer critic that processes short sequences of states, while a DDQN backbone provides the one-step targets needed to keep the learning process stable. Evaluated on a 3-DoF aerial manipulator under identical training conditions, the proposed meta-adaptive planner shows the strongest overall performance with a 10.2% reward increase, a substantial reduction in mean tracking error (from about 6% to 3%), and a 29.6% improvement in the combined reward-error metric relative to the DDQN baseline. Our method exhibits elevated stability in tracking target tip trajectory (by maintaining 5 cm tracking error) when the drone base exhibits drifts due to external disturbances, as opposed to the fixed-beam and Transformer-only variants.
All You Need for Object Detection: From Pixels, Points, and Prompts to Next-Gen Fusion and Multimodal LLMs/VLMs in Autonomous Vehicles
Oct 30, 2025Autonomous Vehicles (AVs) are transforming the future of transportation through advances in intelligent perception, decision-making, and control systems. However, their success is tied to one core capability, reliable object detection in complex and multimodal environments. While recent breakthroughs in Computer Vision (CV) and Artificial Intelligence (AI) have driven remarkable progress, the field still faces a critical challenge as knowledge remains fragmented across multimodal perception, contextual reasoning, and cooperative intelligence. This survey bridges that gap by delivering a forward-looking analysis of object detection in AVs, emphasizing emerging paradigms such as Vision-Language Models (VLMs), Large Language Models (LLMs), and Generative AI rather than re-examining outdated techniques. We begin by systematically reviewing the fundamental spectrum of AV sensors (camera, ultrasonic, LiDAR, and Radar) and their fusion strategies, highlighting not only their capabilities and limitations in dynamic driving environments but also their potential to integrate with recent advances in LLM/VLM-driven perception frameworks. Next, we introduce a structured categorization of AV datasets that moves beyond simple collections, positioning ego-vehicle, infrastructure-based, and cooperative datasets (e.g., V2V, V2I, V2X, I2I), followed by a cross-analysis of data structures and characteristics. Ultimately, we analyze cutting-edge detection methodologies, ranging from 2D and 3D pipelines to hybrid sensor fusion, with particular attention to emerging transformer-driven approaches powered by Vision Transformers (ViTs), Large and Small Language Models (SLMs), and VLMs. By synthesizing these perspectives, our survey delivers a clear roadmap of current capabilities, open challenges, and future opportunities.
Monte Carlo Beam Search for Actor-Critic Reinforcement Learning in Continuous Control
May 13, 2025Actor-critic methods, like Twin Delayed Deep Deterministic Policy Gradient (TD3), depend on basic noise-based exploration, which can result in less than optimal policy convergence. In this study, we introduce Monte Carlo Beam Search (MCBS), a new hybrid method that combines beam search and Monte Carlo rollouts with TD3 to improve exploration and action selection. MCBS produces several candidate actions around the policy's output and assesses them through short-horizon rollouts, enabling the agent to make better-informed choices. We test MCBS across various continuous-control benchmarks, including HalfCheetah-v4, Walker2d-v5, and Swimmer-v5, showing enhanced sample efficiency and performance compared to standard TD3 and other baseline methods like SAC, PPO, and A2C. Our findings emphasize MCBS's capability to enhance policy learning through structured look-ahead search while ensuring computational efficiency. Additionally, we offer a detailed analysis of crucial hyperparameters, such as beam width and rollout depth, and explore adaptive strategies to optimize MCBS for complex control tasks. Our method shows a higher convergence rate across different environments compared to TD3, SAC, PPO, and A2C. For instance, we achieved 90% of the maximum achievable reward within around 200 thousand timesteps compared to 400 thousand timesteps for the second-best method.
Enhanced Cooperative Perception for Autonomous Vehicles Using Imperfect Communication
Apr 10, 2024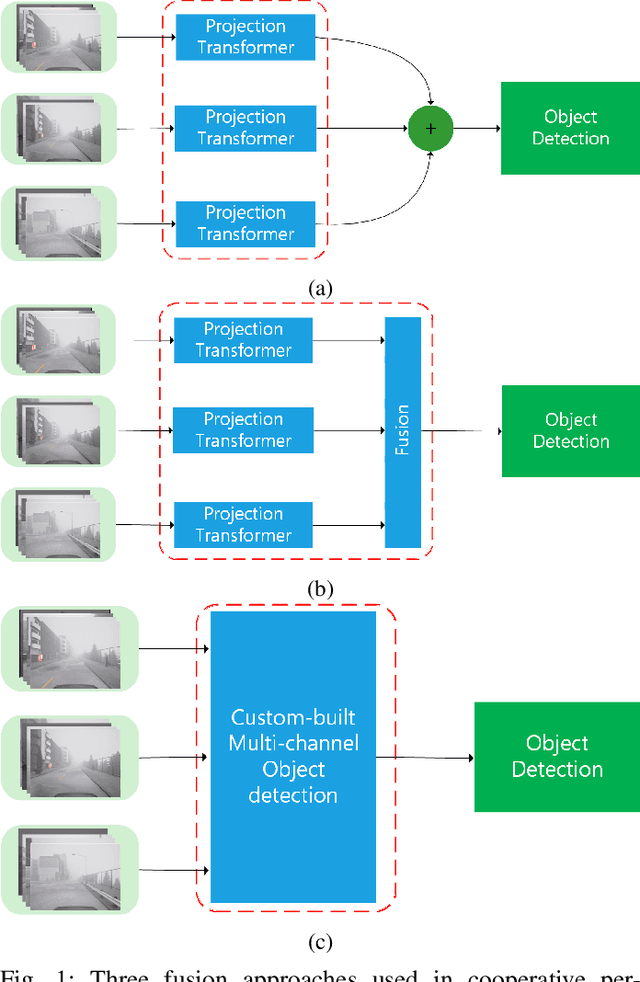
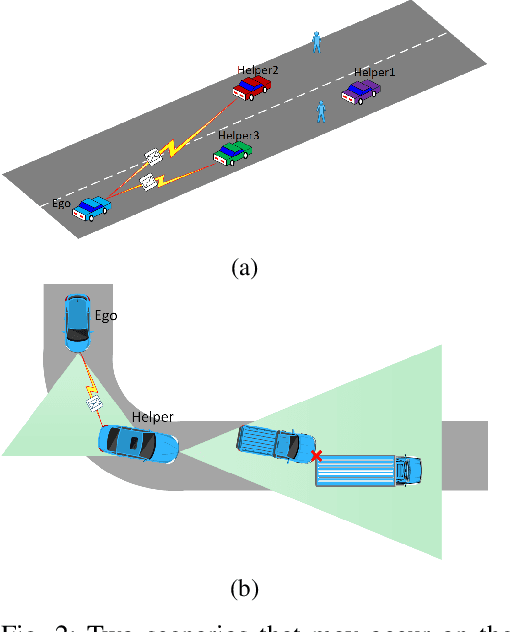
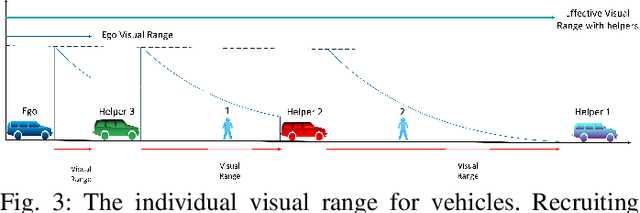
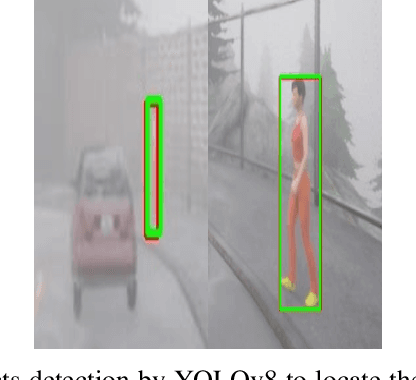
Sharing and joint processing of camera feeds and sensor measurements, known as Cooperative Perception (CP), has emerged as a new technique to achieve higher perception qualities. CP can enhance the safety of Autonomous Vehicles (AVs) where their individual visual perception quality is compromised by adverse weather conditions (haze as foggy weather), low illumination, winding roads, and crowded traffic. To cover the limitations of former methods, in this paper, we propose a novel approach to realize an optimized CP under constrained communications. At the core of our approach is recruiting the best helper from the available list of front vehicles to augment the visual range and enhance the Object Detection (OD) accuracy of the ego vehicle. In this two-step process, we first select the helper vehicles that contribute the most to CP based on their visual range and lowest motion blur. Next, we implement a radio block optimization among the candidate vehicles to further improve communication efficiency. We specifically focus on pedestrian detection as an exemplary scenario. To validate our approach, we used the CARLA simulator to create a dataset of annotated videos for different driving scenarios where pedestrian detection is challenging for an AV with compromised vision. Our results demonstrate the efficacy of our two-step optimization process in improving the overall performance of cooperative perception in challenging scenarios, substantially improving driving safety under adverse conditions. Finally, we note that the networking assumptions are adopted from LTE Release 14 Mode 4 side-link communication, commonly used for Vehicle-to-Vehicle (V2V) communication. Nonetheless, our method is flexible and applicable to arbitrary V2V communications.
Actuator Trajectory Planning for UAVs with Overhead Manipulator using Reinforcement Learning
Aug 25, 2023



In this paper, we investigate the operation of an aerial manipulator system, namely an Unmanned Aerial Vehicle (UAV) equipped with a controllable arm with two degrees of freedom to carry out actuation tasks on the fly. Our solution is based on employing a Q-learning method to control the trajectory of the tip of the arm, also called end-effector. More specifically, we develop a motion planning model based on Time To Collision (TTC), which enables a quadrotor UAV to navigate around obstacles while ensuring the manipulator's reachability. Additionally, we utilize a model-based Q-learning model to independently track and control the desired trajectory of the manipulator's end-effector, given an arbitrary baseline trajectory for the UAV platform. Such a combination enables a variety of actuation tasks such as high-altitude welding, structural monitoring and repair, battery replacement, gutter cleaning, skyscrapper cleaning, and power line maintenance in hard-to-reach and risky environments while retaining compatibility with flight control firmware. Our RL-based control mechanism results in a robust control strategy that can handle uncertainties in the motion of the UAV, offering promising performance. Specifically, our method achieves 92% accuracy in terms of average displacement error (i.e. the mean distance between the target and obtained trajectory points) using Q-learning with 15,000 episodes