 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Cooperative Perception for Autonomous Vehicles Using Imperfect Communication
Paper and Code
Apr 10, 2024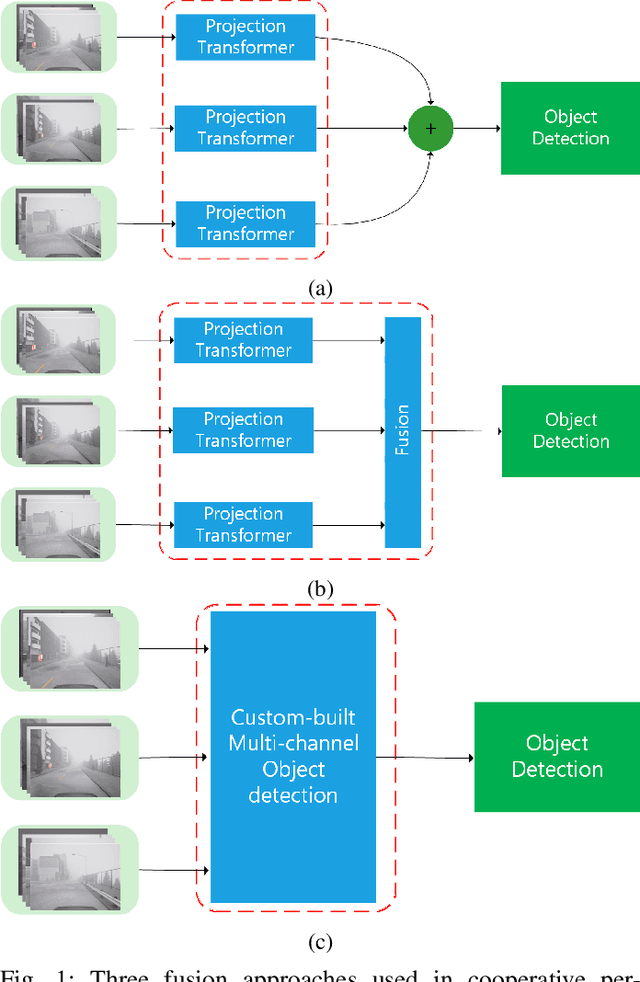
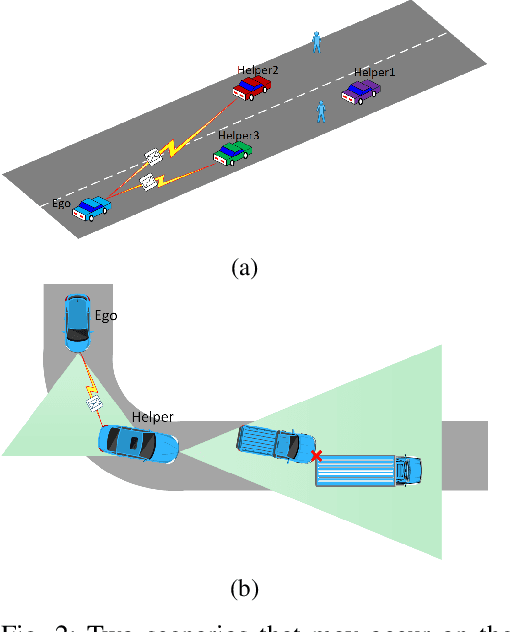
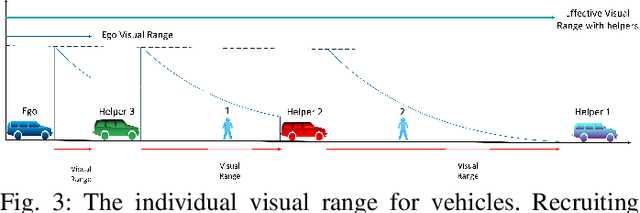
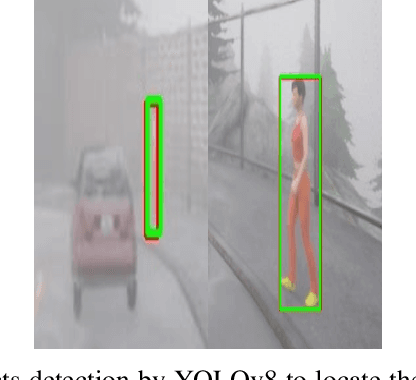
Sharing and joint processing of camera feeds and sensor measurements, known as Cooperative Perception (CP), has emerged as a new technique to achieve higher perception qualities. CP can enhance the safety of Autonomous Vehicles (AVs) where their individual visual perception quality is compromised by adverse weather conditions (haze as foggy weather), low illumination, winding roads, and crowded traffic. To cover the limitations of former methods, in this paper, we propose a novel approach to realize an optimized CP under constrained communications. At the core of our approach is recruiting the best helper from the available list of front vehicles to augment the visual range and enhance the Object Detection (OD) accuracy of the ego vehicle. In this two-step process, we first select the helper vehicles that contribute the most to CP based on their visual range and lowest motion blur. Next, we implement a radio block optimization among the candidate vehicles to further improve communication efficiency. We specifically focus on pedestrian detection as an exemplary scenario. To validate our approach, we used the CARLA simulator to create a dataset of annotated videos for different driving scenarios where pedestrian detection is challenging for an AV with compromised vision. Our results demonstrate the efficacy of our two-step optimization process in improving the overall performance of cooperative perception in challenging scenarios, substantially improving driving safety under adverse conditions. Finally, we note that the networking assumptions are adopted from LTE Release 14 Mode 4 side-link communication, commonly used for Vehicle-to-Vehicle (V2V) communication. Nonetheless, our method is flexible and applicable to arbitrary V2V communications.