 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICG-MVSNet: Learning Intra-view and Cross-view Relationships for Guidance in Multi-View Stereo
Mar 27, 2025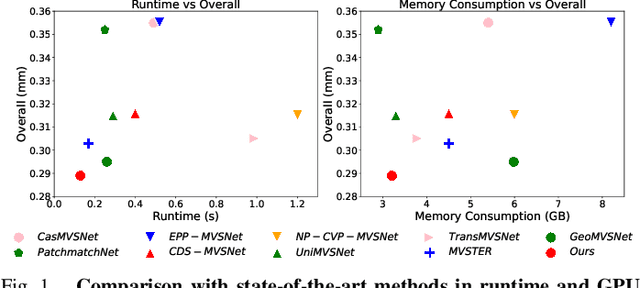
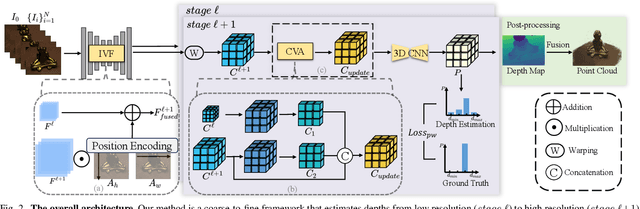
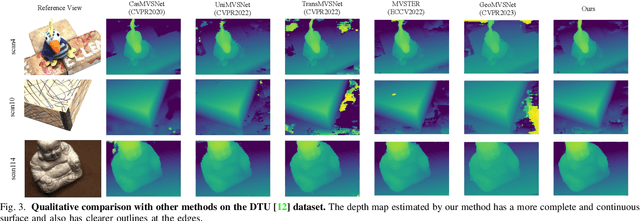
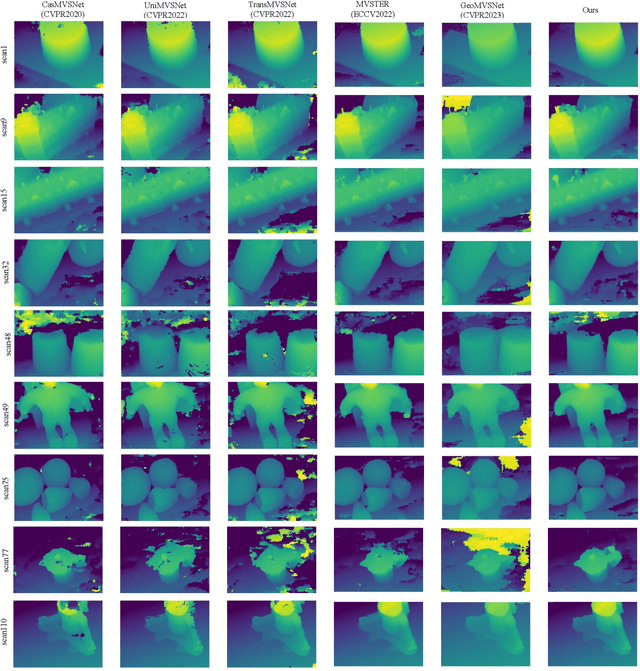
Multi-view Stereo (MVS) aims to estimate depth and reconstruct 3D point clouds from a series of overlapping images. Recent learning-based MVS frameworks overlook the geometric information embedded in features and correlations, leading to weak cost matching. In this paper, we propose ICG-MVSNet, which explicitly integrates intra-view and cross-view relationships for depth estimation. Specifically, we develop an intra-view feature fusion module that leverages the feature coordinate correlations within a single image to enhance robust cost matching. Additionally, we introduce a lightweight cross-view aggregation module that efficiently utilizes the contextual information from volume correlations to guide regularization. Our method is evaluated on the DTU dataset and Tanks and Temples benchmark, consistently achieving competitive performance against state-of-the-art works, while requiring lower computational resources.