 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing Mixed Offline Reinforcement Learning Datasets via Trajectory Weighting
Jun 22, 2023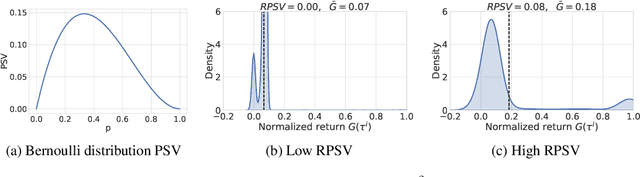
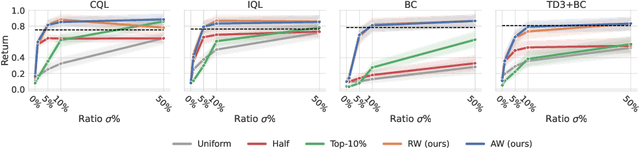
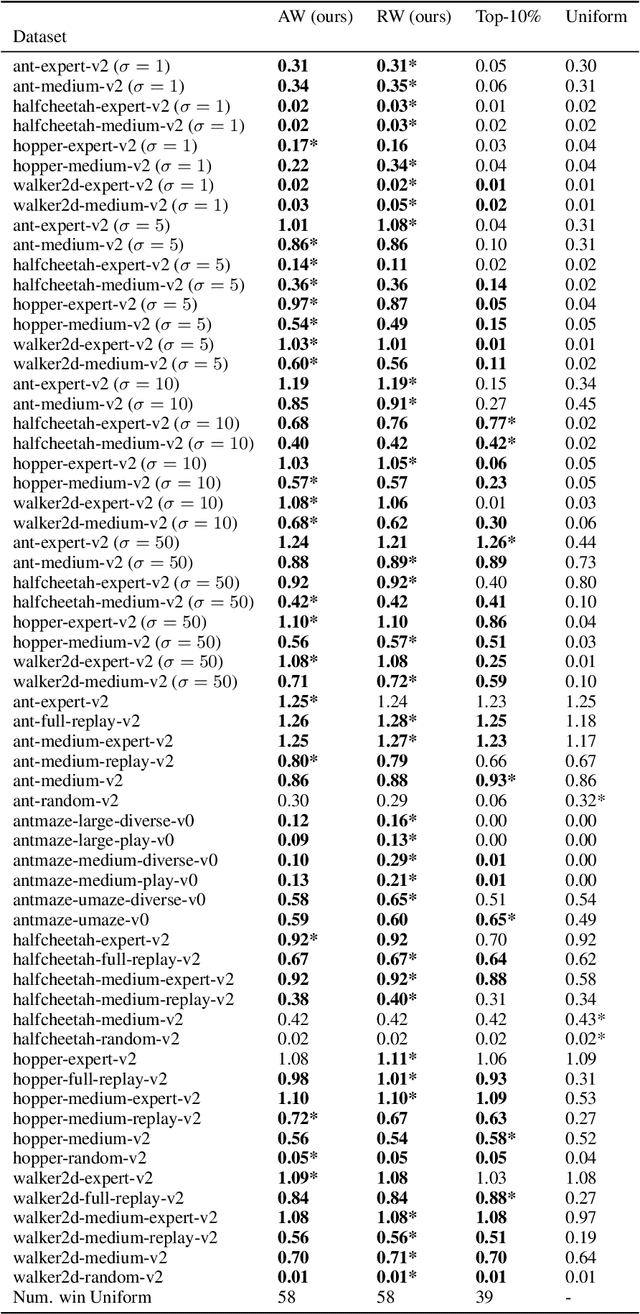
Most offline reinforcement learning (RL) algorithms return a target policy maximizing a trade-off between (1) the expected performance gain over the behavior policy that collected the dataset, and (2) the risk stemming from the out-of-distribution-ness of the induced state-action occupancy. It follows that the performance of the target policy is strongly related to the performance of the behavior policy and, thus, the trajectory return distribution of the dataset. We show that in mixed datasets consisting of mostly low-return trajectories and minor high-return trajectories, state-of-the-art offline RL algorithms are overly restrained by low-return trajectories and fail to exploit high-performing trajectories to the fullest. To overcome this issue, we show that, in deterministic MDPs with stochastic initial states, the dataset sampling can be re-weighted to induce an artificial dataset whose behavior policy has a higher return. This re-weighted sampling strategy may be combined with any offline RL algorithm. We further analyze that the opportunity for performance improvement over the behavior policy correlates with the positive-sided variance of the returns of the trajectories in the dataset. We empirically show that while CQL, IQL, and TD3+BC achieve only a part of this potential policy improvement, these same algorithms combined with our reweighted sampling strategy fully exploit the dataset. Furthermore, we empirically demonstrate that, despite its theoretical limitation, the approach may still be efficient in stochastic environments. The code is available at https://github.com/Improbable-AI/harness-offline-rl.
A single gradient step finds adversarial examples on random two-layers neural networks
Apr 09, 2021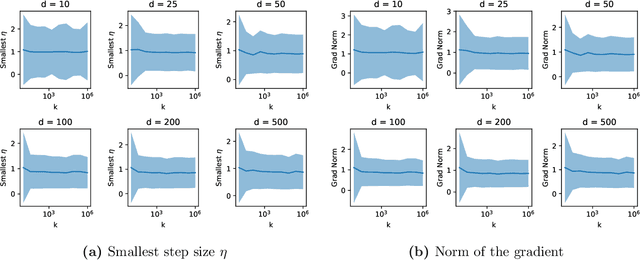
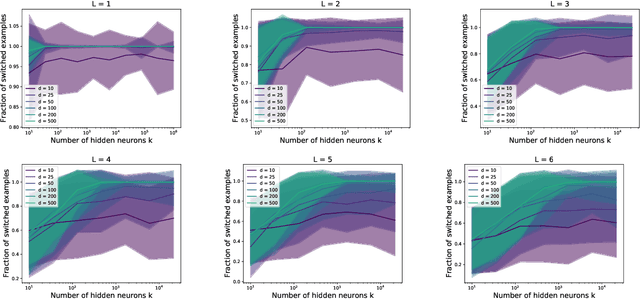
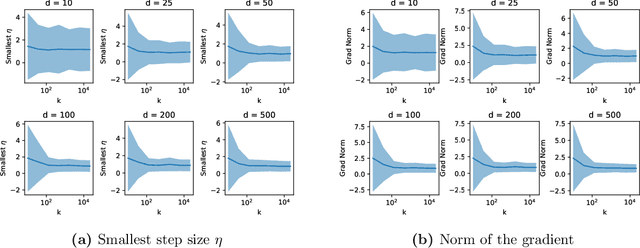
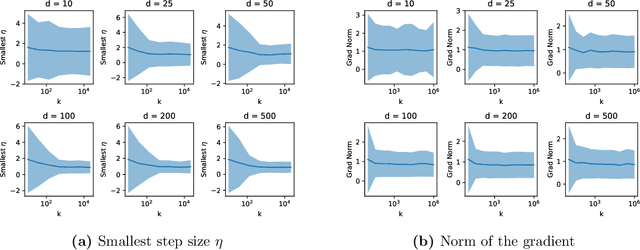
Daniely and Schacham recently showed that gradient descent finds adversarial examples on random undercomplete two-layers ReLU neural networks. The term "undercomplete" refers to the fact that their proof only holds when the number of neurons is a vanishing fraction of the ambient dimension. We extend their result to the overcomplete case, where the number of neurons is larger than the dimension (yet also subexponential in the dimension). In fact we prove that a single step of gradient descent suffices. We also show this result for any subexponential width random neural network with smooth activation function.
Adversarial score matching and improved sampling for image generation
Oct 10, 2020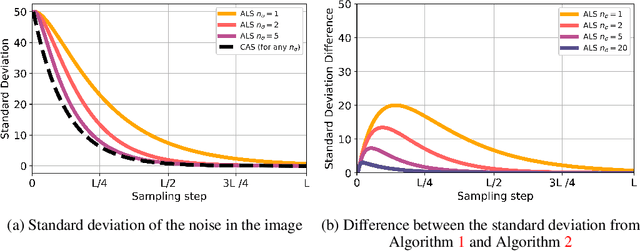
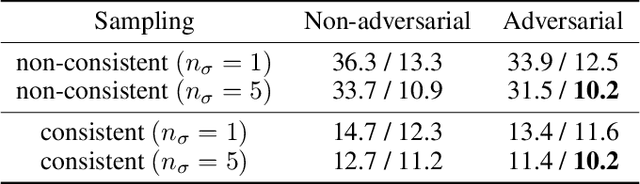
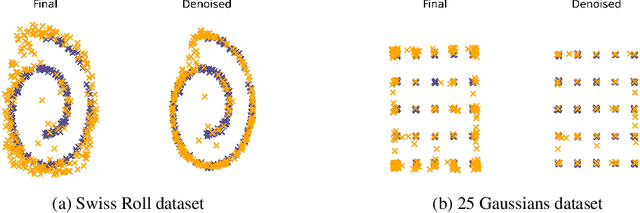
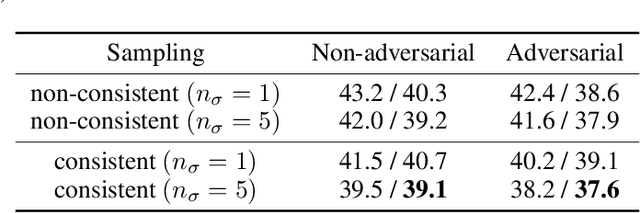
Denoising Score Matching with Annealed Langevin Sampling (DSM-ALS) has recently found success in generative modeling. The approach works by first training a neural network to estimate the score of a distribution, and then using Langevin dynamics to sample from the data distribution assumed by the score network. Despite the convincing visual quality of samples, this method appears to perform worse than Generative Adversarial Networks (GANs) under the Fr\'echet Inception Distance, a standard metric for generative models. We show that this apparent gap vanishes when denoising the final Langevin samples using the score network. In addition, we propose two improvements to DSM-ALS: 1) Consistent Annealed Sampling as a more stable alternative to Annealed Langevin Sampling, and 2) a hybrid training formulation, composed of both Denoising Score Matching and adversarial objectives. By combining these two techniques and exploring different network architectures, we elevate score matching methods and obtain results competitive with state-of-the-art image generation on CIFAR-10.
Safe Policy Improvement with an Estimated Baseline Policy
Sep 11, 2019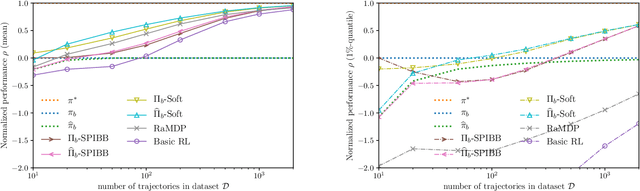
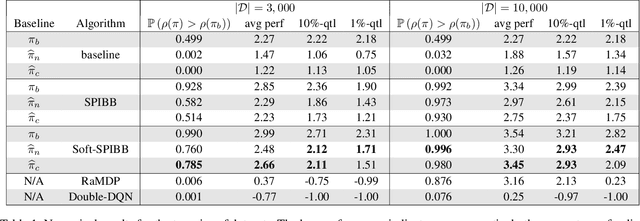
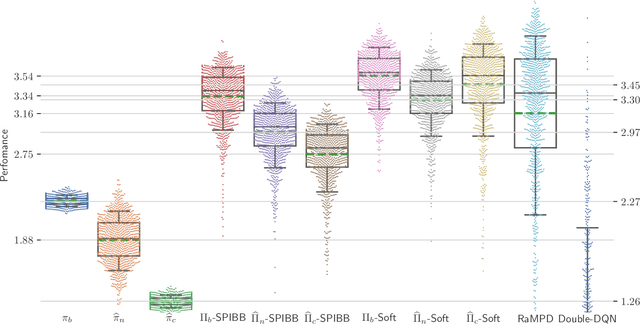
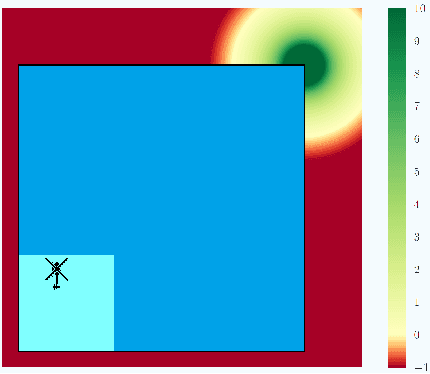
Previous work has shown the unreliability of existing algorithms in the batch Reinforcement Learning setting, and proposed the theoretically-grounded Safe Policy Improvement with Baseline Bootstrapping (SPIBB) fix: reproduce the baseline policy in the uncertain state-action pairs, in order to control the variance on the trained policy performance. However, in many real-world applications such as dialogue systems, pharmaceutical tests or crop management, data is collected under human supervision and the baseline remains unknown. In this paper, we apply SPIBB algorithms with a baseline estimate built from the data. We formally show safe policy improvement guarantees over the true baseline even without direct access to it. Our empirical experiments on finite and continuous states tasks support the theoretical findings. It shows little loss of performance in comparison with SPIBB when the baseline policy is given, and more importantly, drastically and significantly outperforms competing algorithms both in safe policy improvement, and in average performance.
Safe Policy Improvement with Soft Baseline Bootstrapping
Jul 11, 2019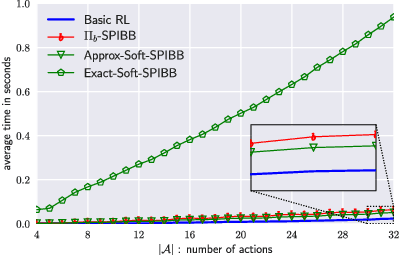
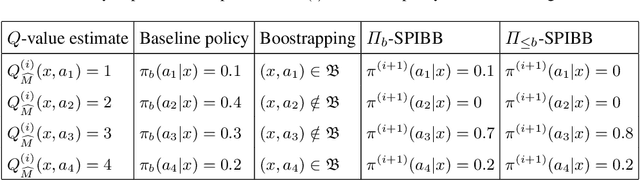
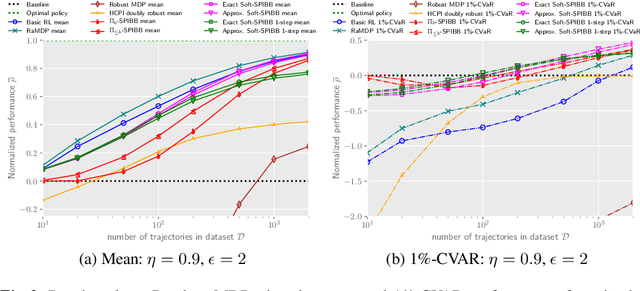
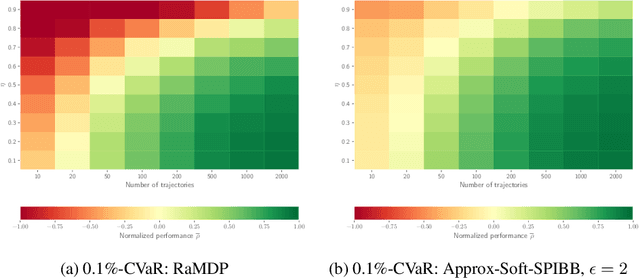
Batch Reinforcement Learning (Batch RL) consists in training a policy using trajectories collected with another policy, called the behavioural policy. Safe policy improvement (SPI) provides guarantees with high probability that the trained policy performs better than the behavioural policy, also called baseline in this setting. Previous work shows that the SPI objective improves mean performance as compared to using the basic RL objective, which boils down to solving the MDP with maximum likelihood. Here, we build on that work and improve more precisely the SPI with Baseline Bootstrapping algorithm (SPIBB) by allowing the policy search over a wider set of policies. Instead of binarily classifying the state-action pairs into two sets (the \textit{uncertain} and the \textit{safe-to-train-on} ones), we adopt a softer strategy that controls the error in the value estimates by constraining the policy change according to the local model uncertainty. The method can take more risks on uncertain actions all the while remaining provably-safe, and is therefore less conservative than the state-of-the-art methods. We propose two algorithms (one optimal and one approximate) to solve this constrained optimization problem and empirically show a significant improvement over existing SPI algorithms both on finite MDPs and on infinite MDPs with a neural network function approximation.