 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymPoint Revolutionized: Boosting Panoptic Symbol Spotting with Layer Feature Enhancement
Jul 02, 2024SymPoint is an initial attempt that utilizes point set representation to solve the panoptic symbol spotting task on CAD drawing. Despite its considerable success, it overlooks graphical layer information and suffers from prohibitively slow training convergence. To tackle this issue, we introduce SymPoint-V2, a robust and efficient solution featuring novel, streamlined designs that overcome these limitations. In particular, we first propose a Layer Feature-Enhanced module (LFE) to encode the graphical layer information into the primitive feature, which significantly boosts the performance. We also design a Position-Guided Training (PGT) method to make it easier to learn, which accelerates the convergence of the model in the early stages and further promotes performance. Extensive experiments show that our model achieves better performance and faster convergence than its predecessor SymPoint on the public benchmark. Our code and trained models are available at https://github.com/nicehuster/SymPointV2.
Symbol as Points: Panoptic Symbol Spotting via Point-based Representation
Jan 19, 2024This work studies the problem of panoptic symbol spotting, which is to spot and parse both countable object instances (windows, doors, tables, etc.) and uncountable stuff (wall, railing, etc.) from computer-aided design (CAD) drawings. Existing methods typically involve either rasterizing the vector graphics into images and using image-based methods for symbol spotting, or directly building graphs and using graph neural networks for symbol recognition. In this paper, we take a different approach, which treats graphic primitives as a set of 2D points that are locally connected and use point cloud segmentation methods to tackle it. Specifically, we utilize a point transformer to extract the primitive features and append a mask2former-like spotting head to predict the final output. To better use the local connection information of primitives and enhance their discriminability, we further propose the attention with connection module (ACM) and contrastive connection learning scheme (CCL). Finally, we propose a KNN interpolation mechanism for the mask attention module of the spotting head to better handle primitive mask downsampling, which is primitive-level in contrast to pixel-level for the image. Our approach, named SymPoint, is simple yet effective, outperforming recent state-of-the-art method GAT-CADNet by an absolute increase of 9.6% PQ and 10.4% RQ on the FloorPlanCAD dataset. The source code and models will be available at https://github.com/nicehuster/SymPoint.
A Multi-Behavior Planning Framework for Robot Guide
Jan 07, 2022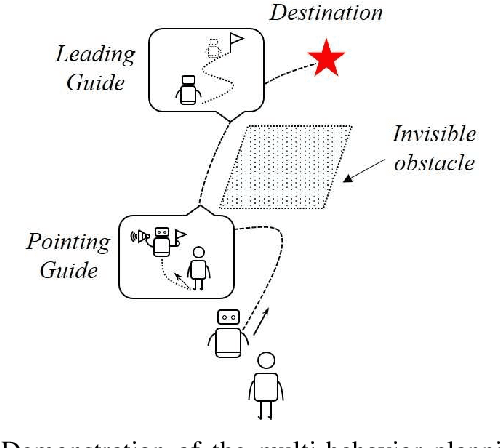
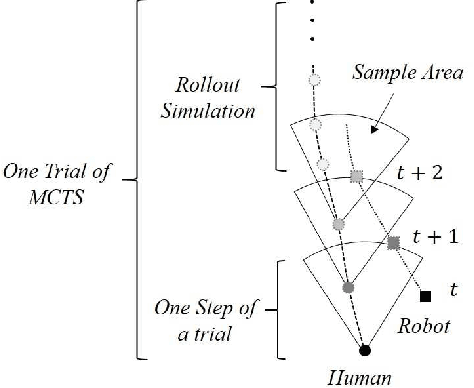
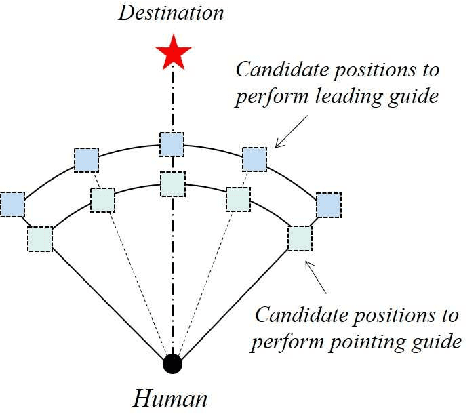
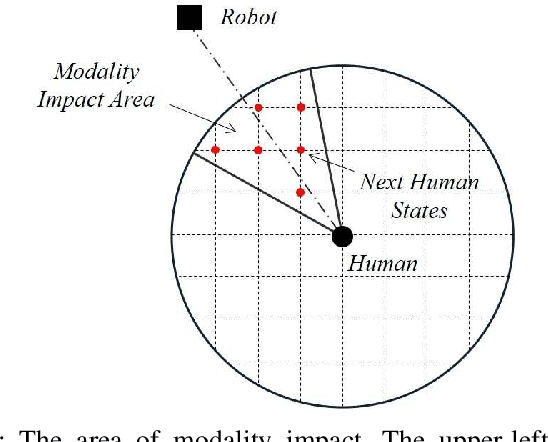
The guiding task of a mobile robot requires not only human-aware navigation, but also appropriate yet timely interaction for active instruction. State-of-the-art tour-guide models limit their socially-aware consideration to adapting to users' motion, ignoring the interactive behavior planning to fulfill the communicative demands. We propose a multi-behavior planning framework based on Monte Carlo Tree Search to better assist users to understand confusing scene contexts, select proper paths and timely arrive at the destination. To provide proactive guidance, we construct a sampling-based probability model of human motion to consider the interrelated effects between robots and humans. We validate our method both in simulation and real-world experiments along with performance comparison with state-of-the-art models.