 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Driving Decisions by Imitating Drivers' Control Behaviors
Nov 30, 2019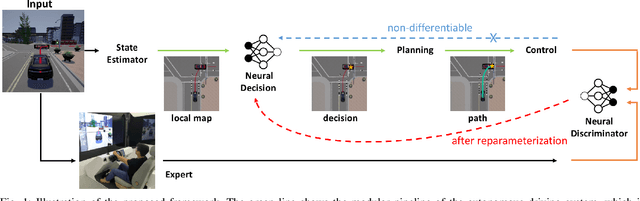



Classical autonomous driving systems are modularized as a pipeline of perception, decision, planning, and control. The driving decision plays a central role in processing the observation from the perception as well as directing the execution of downstream planning and control modules. Commonly the decision module is designed to be rule-based and is difficult to learn from data. Recently end-to-end neural control policy has been proposed to replace this pipeline, given its generalization ability. However, it remains challenging to enforce physical or logical constraints on the decision to ensure driving safety and stability. In this work, we propose a hybrid framework for learning a decision module, which is agnostic to the mechanisms of perception, planning, and control modules. By imitating the low-level control behavior, it learns the high-level driving decisions while bypasses the ambiguous annotation of high-level driving decisions. We demonstrate that the simulation agents with a learned decision module can be generalized to various complex driving scenarios where the rule-based approach fails. Furthermore, it can generate driving behaviors that are smoother and safer than end-to-end neural policies.