 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormalizing Stateful Behavior Trees
Nov 21, 2024
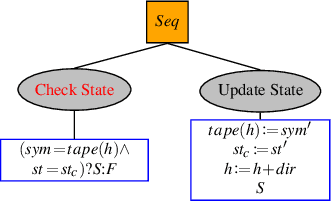
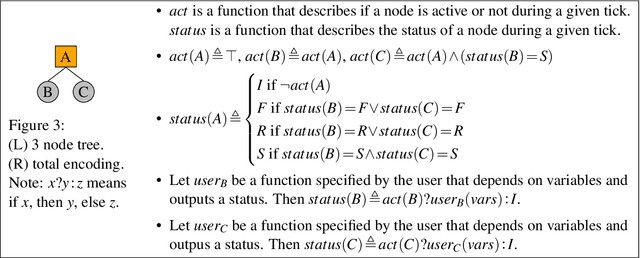
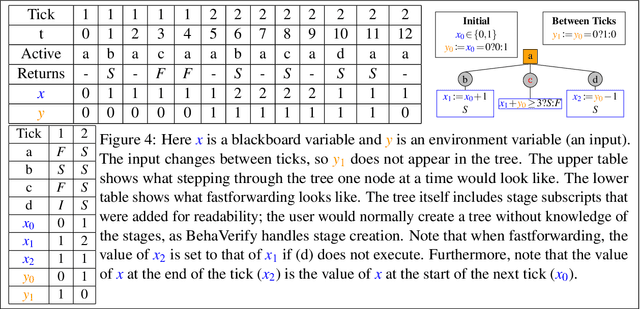
Behavior Trees (BTs) are high-level controllers that are useful in a variety of planning tasks and are gaining traction in robotic mission planning. As they gain popularity in safety-critical domains, it is important to formalize their syntax and semantics, as well as verify properties for them. In this paper, we formalize a class of BTs we call Stateful Behavior Trees (SBTs) that have auxiliary variables and operate in an environment that can change over time. SBTs have access to persistent shared memory (often known as a blackboard) that keeps track of these auxiliary variables. We demonstrate that SBTs are equivalent in computational power to Turing Machines when the blackboard can store mathematical (i.e., unbounded) integers. We further identify syntactic assumptions where SBTs have computational power equivalent to finite state automata, specifically where the auxiliary variables are of finitary types. We present a domain specific language (DSL) for writing SBTs and adapt the tool BehaVerify for use with this DSL. This new DSL in BehaVerify supports interfacing with popular BT libraries in Python, and also provides generation of Haskell code and nuXmv models, the latter of which is used for model checking temporal logic specifications for the SBTs. We include examples and scalability results where BehaVerify outperforms another verification tool by a factor of 100.
* In Proceedings FMAS2024, arXiv:2411.13215
An Empirical Analysis of the Use of Real-Time Reachability for the Safety Assurance of Autonomous Vehicles
May 03, 2022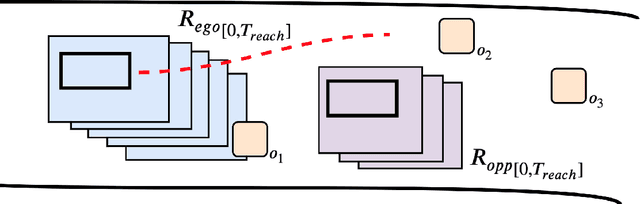
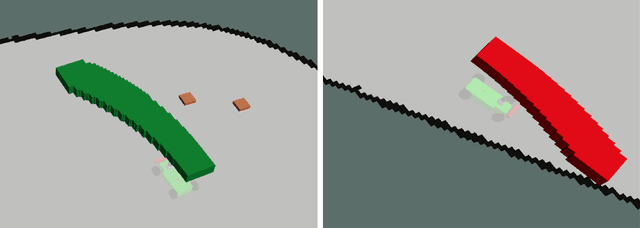
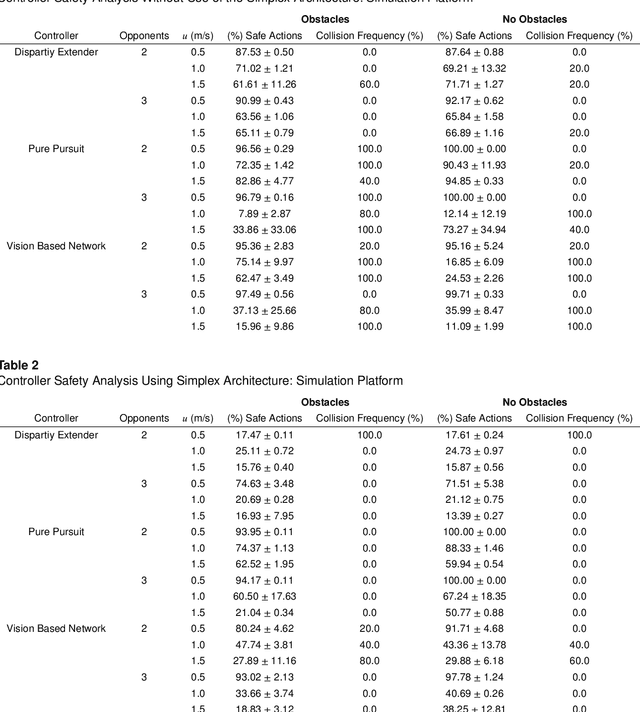
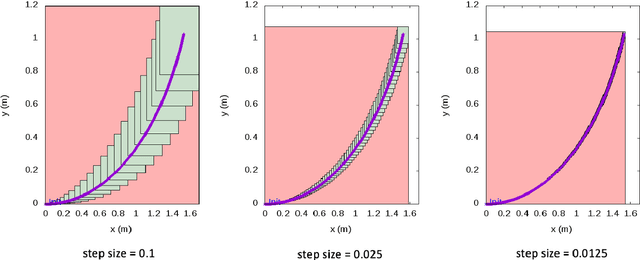
Recent advances in machine learning technologies and sensing have paved the way for the belief that safe, accessible, and convenient autonomous vehicles may be realized in the near future. Despite tremendous advances within this context, fundamental challenges around safety and reliability are limiting their arrival and comprehensive adoption. Autonomous vehicles are often tasked with operating in dynamic and uncertain environments. As a result, they often make use of highly complex components, such as machine learning approaches, to handle the nuances of sensing, actuation, and control. While these methods are highly effective, they are notoriously difficult to assure. Moreover, within uncertain and dynamic environments, design time assurance analyses may not be sufficient to guarantee safety. Thus, it is critical to monitor the correctness of these systems at runtime. One approach for providing runtime assurance of systems with components that may not be amenable to formal analysis is the simplex architecture, where an unverified component is wrapped with a safety controller and a switching logic designed to prevent dangerous behavior. In this paper, we propose using a real-time reachability algorithm for the implementation of the simplex architecture to assure the safety of a 1/10 scale open source autonomous vehicle platform known as F1/10. The reachability algorithm that we leverage (a) provides provable guarantees of safety, and (b) is used to detect potentially unsafe scenarios. In our approach, the need to analyze an underlying controller is abstracted away, instead focusing on the effects of the controller's decisions on the system's future states. We demonstrate the efficacy of our architecture through a vast set of experiments conducted both in simulation and on an embedded hardware platform.
Automated detection of pitting and stress corrosion cracks in used nuclear fuel dry storage canisters using residual neural networks
Mar 06, 2020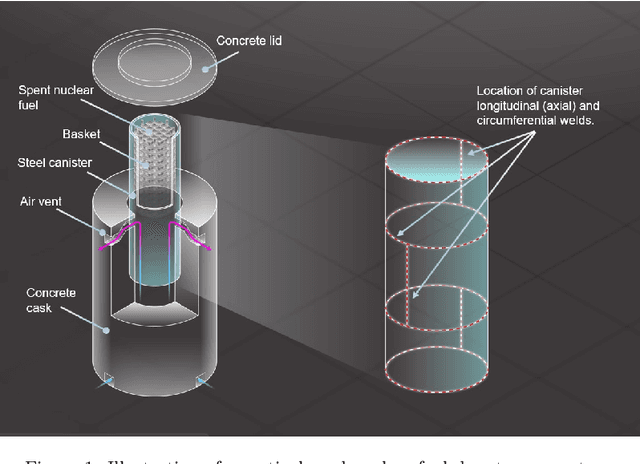
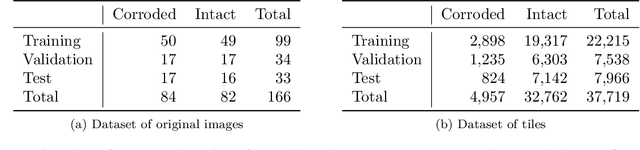

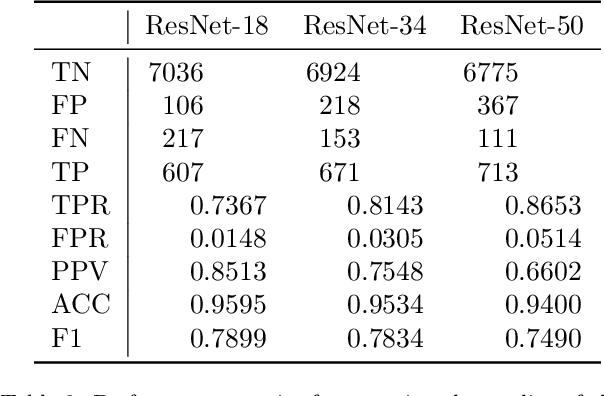
Nondestructive evaluation methods play an important role in ensuring component integrity and safety in many industries. Operator fatigue can play a critical role in the reliability of such methods. This is important for inspecting high value assets or assets with a high consequence of failure, such as aerospace and nuclear components. Recent advances in convolution neural networks can support and automate these inspection efforts. This paper proposes using residual neural networks (ResNets) for real-time detection of pitting and stress corrosion cracking, with a focus on dry storage canisters housing used nuclear fuel. The proposed approach crops nuclear canister images into smaller tiles, trains a ResNet on these tiles, and classifies images as corroded or intact using the per-image count of tiles predicted as corroded by the ResNet. The results demonstrate that such a deep learning approach allows to detect the locus of corrosion cracks via smaller tiles, and at the same time to infer with high accuracy whether an image comes from a corroded canister. Thereby, the proposed approach holds promise to automate and speed up nuclear fuel canister inspections, to minimize inspection costs, and to partially replace human-conducted onsite inspections, thus reducing radiation doses to personnel.