 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Models in the Abuse Detection Pipeline
Mar 31, 2026Online abuse has grown increasingly complex, spanning toxic language, harassment, manipulation, and fraudulent behavior. Traditional machine-learning approaches dependent on static classifiers and labor-intensive labeling struggle to keep pace with evolving threat patterns and nuanced policy requirements. Large Language Models introduce new capabilities for contextual reasoning, policy interpretation, explanation generation, and cross-modal understanding, enabling them to support multiple stages of modern safety systems. This survey provides a lifecycle-oriented analysis of how LLMs are being integrated into the Abuse Detection Lifecycle (ADL), which we define across four stages: (I) Label \& Feature Generation, (II) Detection, (III) Review \& Appeals, and (IV) Auditing \& Governance. For each stage, we synthesize emerging research and industry practices, highlight architectural considerations for production deployment, and examine the strengths and limitations of LLM-driven approaches. We conclude by outlining key challenges including latency, cost-efficiency, determinism, adversarial robustness, and fairness and discuss future research directions needed to operationalize LLMs as reliable, accountable components of large-scale abuse-detection and governance systems.
Demonstrating Wheeled Lab: Modern Sim2Real for Low-cost, Open-source Wheeled Robotics
Feb 11, 2025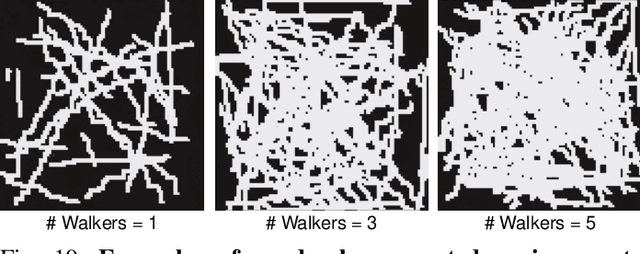
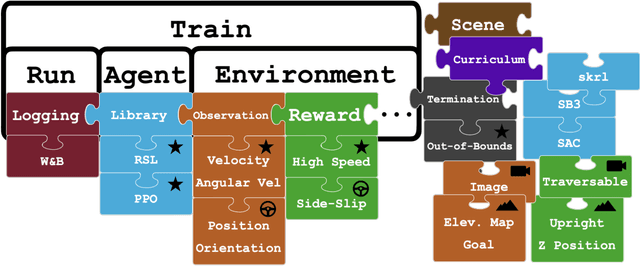
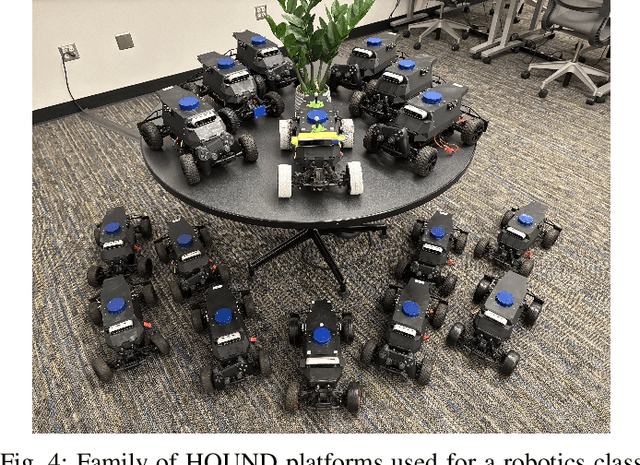
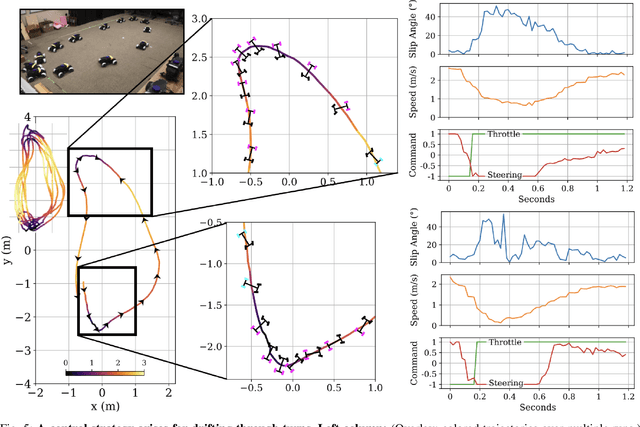
Simulation has been pivotal in recent robotics milestones and is poised to play a prominent role in the field's future. However, recent robotic advances often rely on expensive and high-maintenance platforms, limiting access to broader robotics audiences. This work introduces Wheeled Lab, a framework for the low-cost, open-source wheeled platforms that are already widely established in education and research. Through integration with Isaac Lab, Wheeled Lab introduces modern techniques in Sim2Real, such as domain randomization, sensor simulation, and end-to-end learning, to new user communities. To kickstart education and demonstrate the framework's capabilities, we develop three state-of-the-art policies for small-scale RC cars: controlled drifting, elevation traversal, and visual navigation, each trained in simulation and deployed in the real world. By bridging the gap between advanced Sim2Real methods and affordable, available robotics, Wheeled Lab aims to democratize access to cutting-edge tools, fostering innovation and education in a broader robotics context. The full stack, from hardware to software, is low cost and open-source.
Dynamics Models in the Aggressive Off-Road Driving Regime
May 26, 2024



Current developments in autonomous off-road driving are steadily increasing performance through higher speeds and more challenging, unstructured environments. However, this operating regime subjects the vehicle to larger inertial effects, where consideration of higher-order states is necessary to avoid failures such as rollovers or excessive impact forces. Aggressive driving through Model Predictive Control (MPC) in these conditions requires dynamics models that accurately predict safety-critical information. This work aims to empirically quantify this aggressive operating regime and its effects on the performance of current models. We evaluate three dynamics models of varying complexity on two distinct off-road driving datasets: one simulated and the other real-world. By conditioning trajectory data on higher-order states, we show that model accuracy degrades with aggressiveness and simpler models degrade faster. These models are also validated across datasets, where accuracies over safety-critical states are reported and provide benchmarks for future work.