 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstrating Wheeled Lab: Modern Sim2Real for Low-cost, Open-source Wheeled Robotics
Feb 11, 2025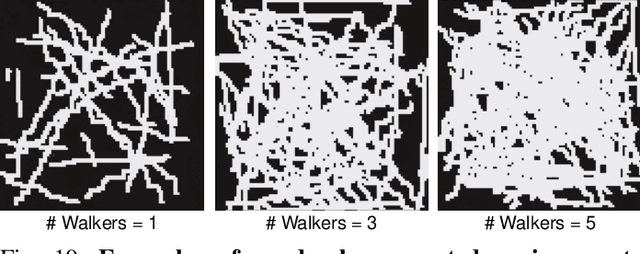
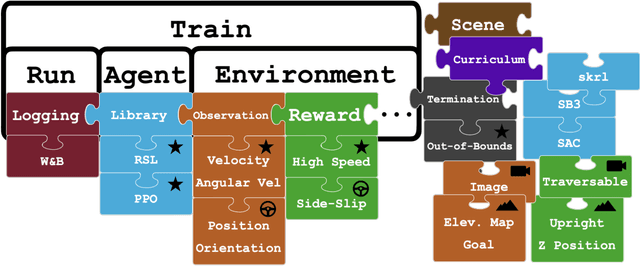
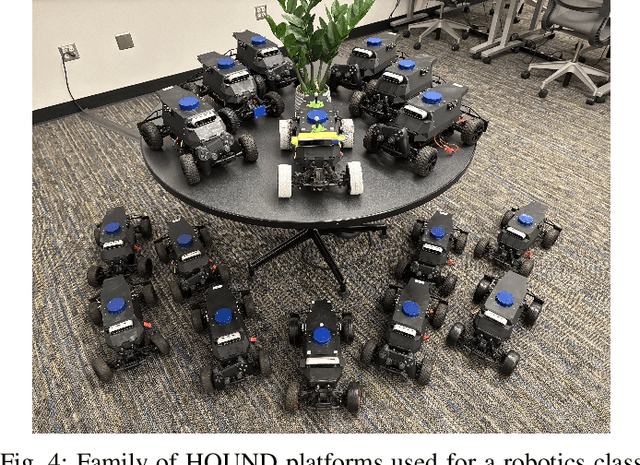
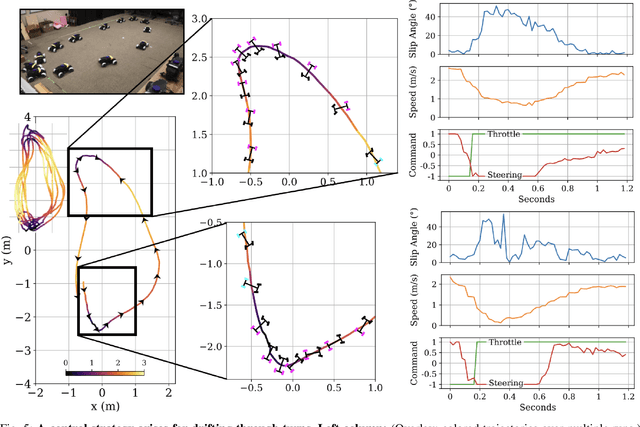
Simulation has been pivotal in recent robotics milestones and is poised to play a prominent role in the field's future. However, recent robotic advances often rely on expensive and high-maintenance platforms, limiting access to broader robotics audiences. This work introduces Wheeled Lab, a framework for the low-cost, open-source wheeled platforms that are already widely established in education and research. Through integration with Isaac Lab, Wheeled Lab introduces modern techniques in Sim2Real, such as domain randomization, sensor simulation, and end-to-end learning, to new user communities. To kickstart education and demonstrate the framework's capabilities, we develop three state-of-the-art policies for small-scale RC cars: controlled drifting, elevation traversal, and visual navigation, each trained in simulation and deployed in the real world. By bridging the gap between advanced Sim2Real methods and affordable, available robotics, Wheeled Lab aims to democratize access to cutting-edge tools, fostering innovation and education in a broader robotics context. The full stack, from hardware to software, is low cost and open-source.
Comparison of Data-Driven Approaches to Configuration Space Approximation
May 24, 2023Configuration spaces (C-spaces) are an essential component of many robot path-planning algorithms, yet calculating them is a time-consuming task, especially in spaces involving a large number of degrees of freedom (DoF). Here we explore a two-step data-driven approach to C-space approximation: (1) sample (i.e., explicitly calculate) a few configurations; (2) train a machine learning (ML) model on these configurations to predict the collision status of other points in the C-space. We studied multiple factors that impact this approximation process, including model representation, number of DoF (up to 42), collision density, sample size, training set distribution, and desired confidence of predictions. We conclude that XGBoost offers a significant time improvement over other methods, while maintaining low error rates, even in C-Spaces with over 14 DoF.