 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatentFormer: Multi-Agent Transformer-Based Interaction Modeling and Trajectory Prediction
Mar 03, 2022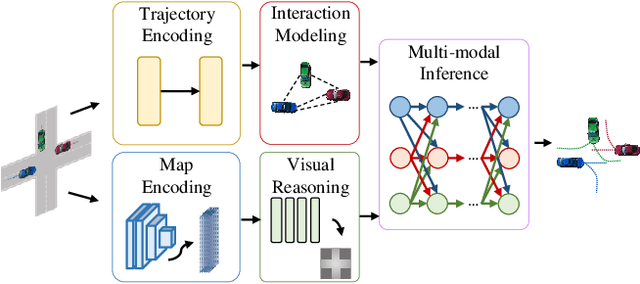
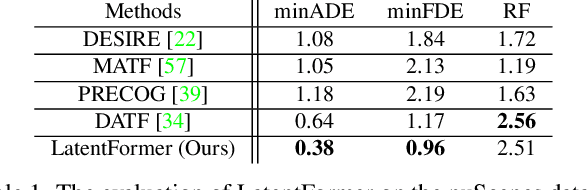
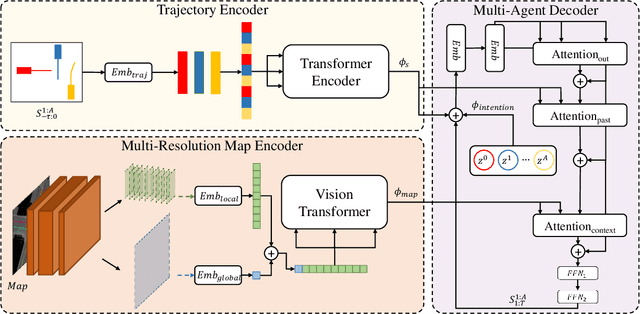

Multi-agent trajectory prediction is a fundamental problem in autonomous driving. The key challenges in prediction are accurately anticipating the behavior of surrounding agents and understanding the scene context. To address these problems, we propose LatentFormer, a transformer-based model for predicting future vehicle trajectories. The proposed method leverages a novel technique for modeling interactions among dynamic objects in the scene. Contrary to many existing approaches which model cross-agent interactions during the observation time, our method additionally exploits the future states of the agents. This is accomplished using a hierarchical attention mechanism where the evolving states of the agents autoregressively control the contributions of past trajectories and scene encodings in the final prediction. Furthermore, we propose a multi-resolution map encoding scheme that relies on a vision transformer module to effectively capture both local and global scene context to guide the generation of more admissible future trajectories. We evaluate the proposed method on the nuScenes benchmark dataset and show that our approach achieves state-of-the-art performance and improves upon trajectory metrics by up to 40%. We further investigate the contributions of various components of the proposed technique via extensive ablation studies.
PePScenes: A Novel Dataset and Baseline for Pedestrian Action Prediction in 3D
Dec 14, 2020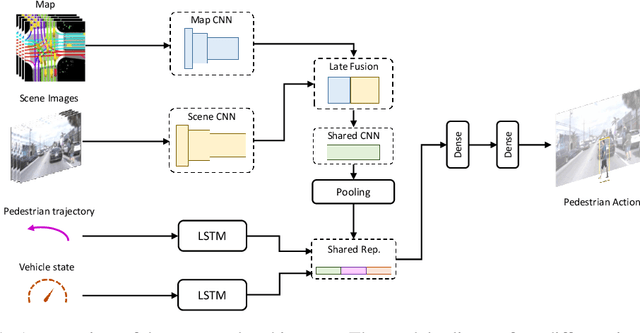
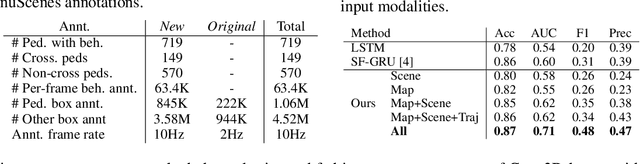
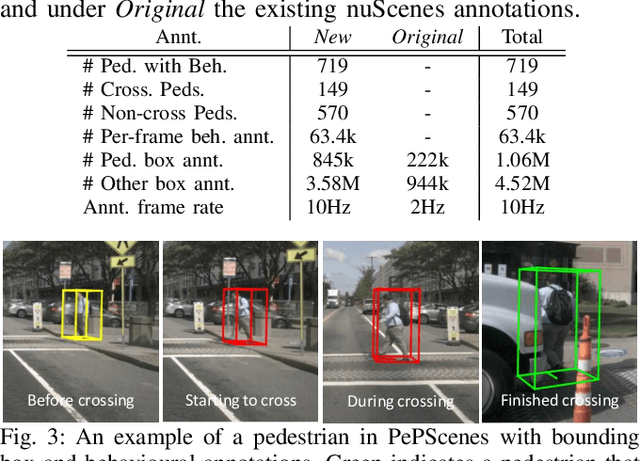
Predicting the behavior of road users, particularly pedestrians, is vital for safe motion planning in the context of autonomous driving systems. Traditionally, pedestrian behavior prediction has been realized in terms of forecasting future trajectories. However, recent evidence suggests that predicting higher-level actions, such as crossing the road, can help improve trajectory forecasting and planning tasks accordingly. There are a number of existing datasets that cater to the development of pedestrian action prediction algorithms, however, they lack certain characteristics, such as bird's eye view semantic map information, 3D locations of objects in the scene, etc., which are crucial in the autonomous driving context. To this end, we propose a new pedestrian action prediction dataset created by adding per-frame 2D/3D bounding box and behavioral annotations to the popular autonomous driving dataset, nuScenes. In addition, we propose a hybrid neural network architecture that incorporates various data modalities for predicting pedestrian crossing action. By evaluating our model on the newly proposed dataset, the contribution of different data modalities to the prediction task is revealed. The dataset is available at https://github.com/huawei-noah/PePScenes.
Graph-SIM: A Graph-based Spatiotemporal Interaction Modelling for Pedestrian Action Prediction
Dec 03, 2020
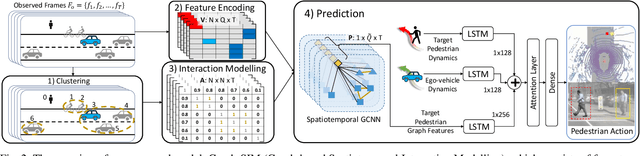
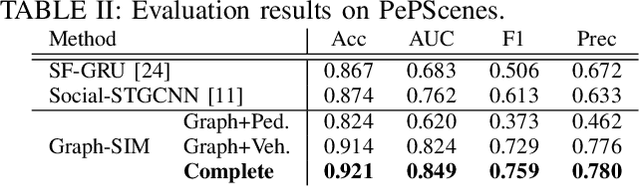
One of the most crucial yet challenging tasks for autonomous vehicles in urban environments is predicting the future behaviour of nearby pedestrians, especially at points of crossing. Predicting behaviour depends on many social and environmental factors, particularly interactions between road users. Capturing such interactions requires a global view of the scene and dynamics of the road users in three-dimensional space. This information, however, is missing from the current pedestrian behaviour benchmark datasets. Motivated by these challenges, we propose 1) a novel graph-based model for predicting pedestrian crossing action. Our method models pedestrians' interactions with nearby road users through clustering and relative importance weighting of interactions using features obtained from the bird's-eye-view. 2) We introduce a new dataset that provides 3D bounding box and pedestrian behavioural annotations for the existing nuScenes dataset. On the new data, our approach achieves state-of-the-art performance by improving on various metrics by more than 10% in comparison to existing methods. Upon publishing of this paper, our dataset will be made publicly available.