 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-SIM: A Graph-based Spatiotemporal Interaction Modelling for Pedestrian Action Prediction
Paper and Code

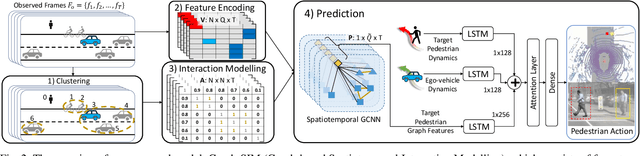
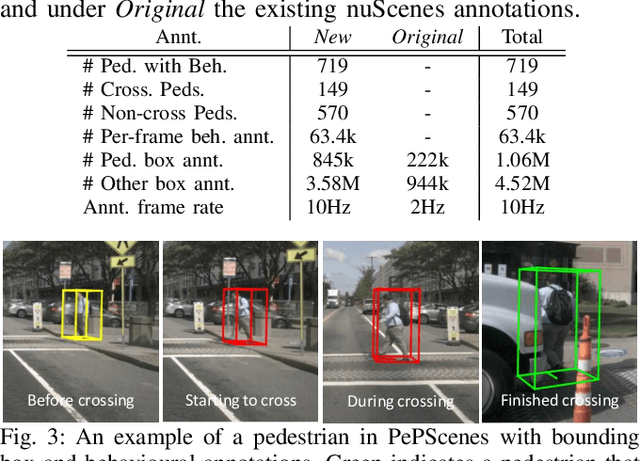
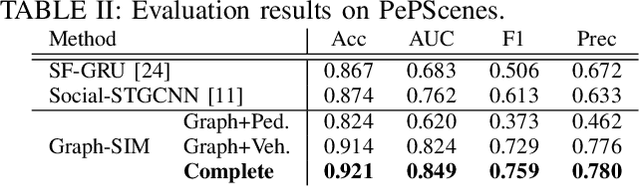
One of the most crucial yet challenging tasks for autonomous vehicles in urban environments is predicting the future behaviour of nearby pedestrians, especially at points of crossing. Predicting behaviour depends on many social and environmental factors, particularly interactions between road users. Capturing such interactions requires a global view of the scene and dynamics of the road users in three-dimensional space. This information, however, is missing from the current pedestrian behaviour benchmark datasets. Motivated by these challenges, we propose 1) a novel graph-based model for predicting pedestrian crossing action. Our method models pedestrians' interactions with nearby road users through clustering and relative importance weighting of interactions using features obtained from the bird's-eye-view. 2) We introduce a new dataset that provides 3D bounding box and pedestrian behavioural annotations for the existing nuScenes dataset. On the new data, our approach achieves state-of-the-art performance by improving on various metrics by more than 10% in comparison to existing methods. Upon publishing of this paper, our dataset will be made publicly available.