 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicular Wireless Positioning -- A Survey
Jan 28, 2026The rapid advancement of connected and autonomous vehicles has driven a growing demand for precise and reliable positioning systems capable of operating in complex environments. Meeting these demands requires an integrated approach that combines multiple positioning technologies, including wireless-based systems, perception-based technologies, and motion-based sensors. This paper presents a comprehensive survey of wireless-based positioning for vehicular applications, with a focus on satellite-based positioning (such as global navigation satellite systems (GNSS) and low-Earth-orbit (LEO) satellites), cellular-based positioning (5G and beyond), and IEEE-based technologies (including Wi-Fi, ultrawideband (UWB), Bluetooth, and vehicle-to-vehicle (V2V) communications). First, the survey reviews a wide range of vehicular positioning use cases, outlining their specific performance requirements. Next, it explores the historical development, standardization, and evolution of each wireless positioning technology, providing an in-depth categorization of existing positioning solutions and algorithms, and identifying open challenges and contemporary trends. Finally, the paper examines sensor fusion techniques that integrate these wireless systems with onboard perception and motion sensors to enhance positioning accuracy and resilience in real-world conditions. This survey thus offers a holistic perspective on the historical foundations, current advancements, and future directions of wireless-based positioning for vehicular applications, addressing a critical gap in the literature.
Integrated Communication, Localization, and Sensing in 6G D-MIMO Networks
Mar 28, 2024



Future generations of mobile networks call for concurrent sensing and communication functionalities in the same hardware and/or spectrum. Compared to communication, sensing services often suffer from limited coverage, due to the high path loss of the reflected signal and the increased infrastructure requirements. To provide a more uniform quality of service, distributed multiple input multiple output (D-MIMO) systems deploy a large number of distributed nodes and efficiently control them, making distributed integrated sensing and communications (ISAC) possible. In this paper, we investigate ISAC in D-MIMO through the lens of different design architectures and deployments, revealing both conflicts and synergies. In addition, simulation and demonstration results reveal both opportunities and challenges towards the implementation of ISAC in D-MIMO.
Experimental Validation of Single BS 5G mmWave Positioning and Mapping for Intelligent Transport
Mar 21, 2023



Positioning with 5G signals generally requires connection to several base stations (BSs), which makes positioning more demanding in terms of infrastructure than communications. To address this issue, there have been several theoretical studies on single BS positioning, leveraging high-resolution angle and delay estimation and multipath exploitation possibilities at mmWave frequencies. This paper presents the first realistic experimental validation of such studies, involving a commercial 5G mmWave BS and a user equipment (UE) development kit mounted on a test vehicle. We present the relevant signal models, signal processing methods (including channel parameter estimation and position estimation), and validate these based on real data collected in an outdoor science park environment. Our results indicate that positioning is possible, but the performance with a single BS is limited by the knowledge of the position and orientation of the infrastructure and the multipath visibility and diversity.
Vehicular Positioning and Tracking in Multipath Non-Line-of-Sight Channels
Mar 31, 2022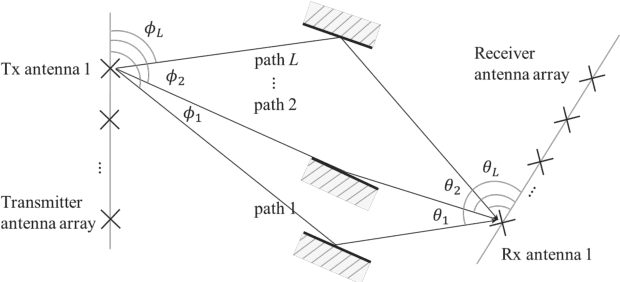
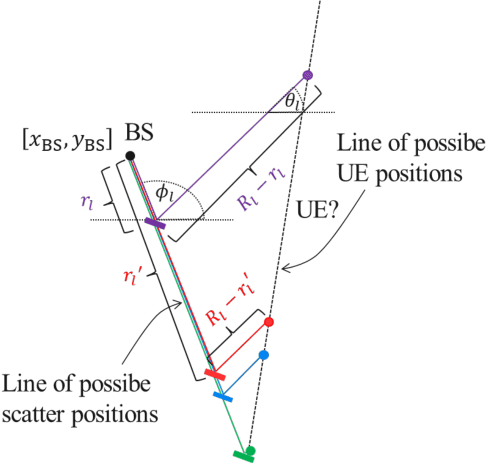
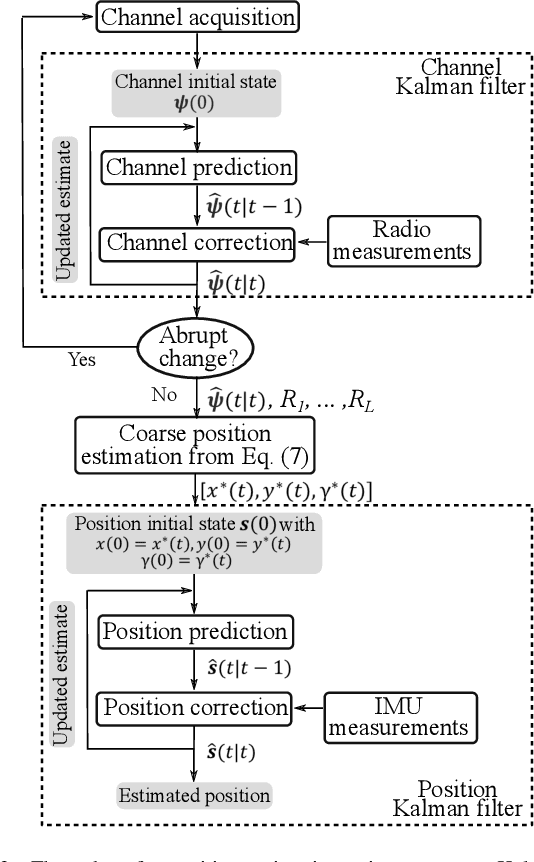

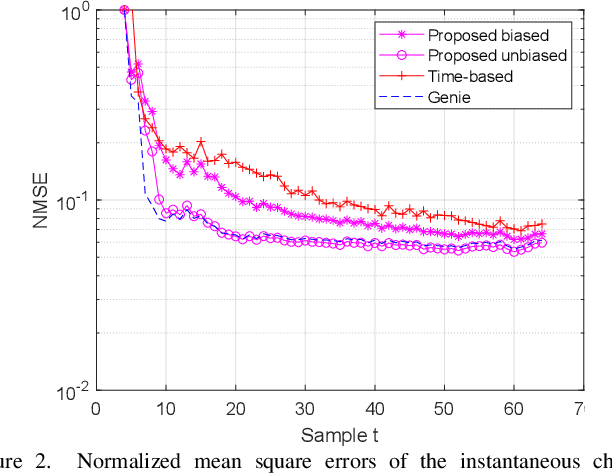
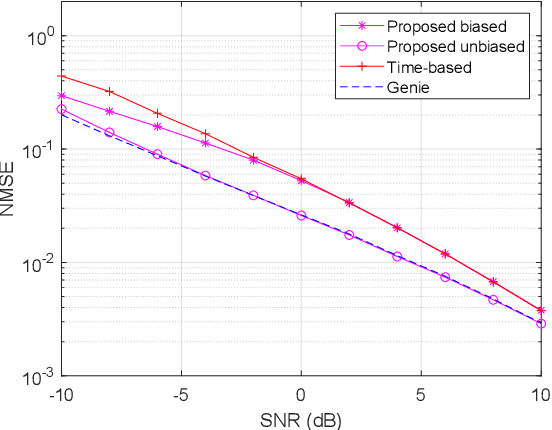
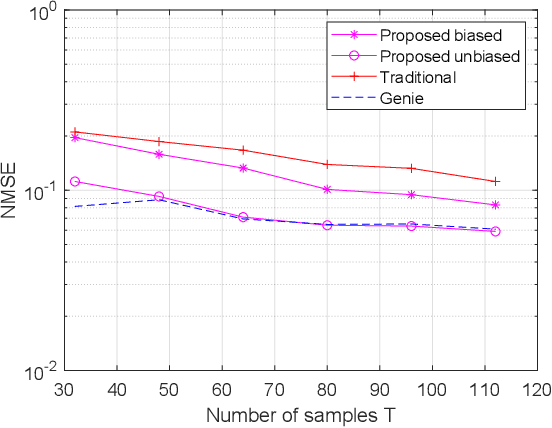
We consider the downlink transmission in a single cell multiple-input multiple-output system, in which the user equipment correspond to a vehicle moving along a given trajectory. This system utilizes millimeter wave channels characterized by multiple non-line-of-sight (NLoS) components. As it has been pointed out in several related works, in such systems radio access network (RAN)-based positioning can effectively improve the positioning accuracy achieved by Global Navigation Satellite Systems. However, the RAN-based positioning accuracy is highly dependent on the quality of the channel estimates, especially if multipath propagation is exploited. Recognizing that the communication channels between the serving base station and the vehicle as well as the geographical position of the vehicle can be advantageously modeled as inter-related autoregressive processes, we propose a two-stage Kalman filter algorithm employing two intertwined filters for channel tracking, position tracking and abrupt channel change detection. The first Kalman filter tracks angles-of-departure and angles-of-arrival associated with the communication channels, which are used to make a coarse position estimation. The second Kalman filter tracks the position of the vehicle utilizing the kinematic parameters of the vehicle. Simulation results clearly show the advantages of using the proposed scheme, which exploits the memoryful property of both the communication channels and the geographical positions, as compared to employing previously proposed single-stage or not properly combined filters in NLoS environments.
On Estimating the Autoregressive Coefficients of Time-Varying Fading Channels
Mar 31, 2022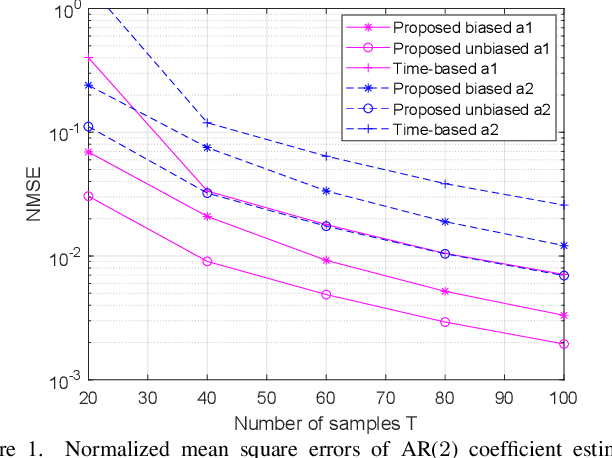
As several previous works have pointed out, the evolution of the wireless channels in multiple input multiple output systems can be advantageously modeled as an autoregressive process. Therefore, estimating the coefficients, and, in particular, the state transition matrix of this autoregressive process is a key to accurate channel estimation, tracking, and prediction in fast fading environments. In this paper we assume a time varying spatially uncorrelated channel, which is approximately the case with proper antenna spacing at the base station in rich scattering environments. We propose a method for autoregressive parameter estimation for the single input multiple output (SIMO) channel. We show an almost sure convergence of the estimated coefficients to the true autoregressive coefficients in large dimensions. We apply the proposed method to SIMO channel tracking.
* 5 pages 4 figures, 18 references