 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainer-guided Targeted Adversarial Attacks against Binary Code Similarity Detection Models
Jun 05, 2025Binary code similarity detection (BCSD) serves as a fundamental technique for various software engineering tasks, e.g., vulnerability detection and classification. Attacks against such models have therefore drawn extensive attention, aiming at misleading the models to generate erroneous predictions. Prior works have explored various approaches to generating semantic-preserving variants, i.e., adversarial samples, to evaluate the robustness of the models against adversarial attacks. However, they have mainly relied on heuristic criteria or iterative greedy algorithms to locate salient code influencing the model output, failing to operate on a solid theoretical basis. Moreover, when processing programs with high complexities, such attacks tend to be time-consuming. In this work, we propose a novel optimization for adversarial attacks against BCSD models. In particular, we aim to improve the attacks in a challenging scenario, where the attack goal is to limit the model predictions to a specific range, i.e., the targeted attacks. Our attack leverages the superior capability of black-box, model-agnostic explainers in interpreting the model decision boundaries, thereby pinpointing the critical code snippet to apply semantic-preserving perturbations. The evaluation results demonstrate that compared with the state-of-the-art attacks, the proposed attacks achieve higher attack success rate in almost all scenarios, while also improving the efficiency and transferability. Our real-world case studies on vulnerability detection and classification further demonstrate the security implications of our attacks, highlighting the urgent need to further enhance the robustness of existing BCSD models.
Safe, Efficient, Comfort, and Energy-saving Automated Driving through Roundabout Based on Deep Reinforcement Learning
Jun 20, 2023Traffic scenarios in roundabouts pose substantial complexity for automated driving. Manually mapping all possible scenarios into a state space is labor-intensive and challenging. Deep reinforcement learning (DRL) with its ability to learn from interacting with the environment emerges as a promising solution for training such automated driving models. This study explores, employs, and implements various DRL algorithms, namely Deep Deterministic Policy Gradient (DDPG), Proximal Policy Optimization (PPO), and Trust Region Policy Optimization (TRPO) to instruct automated vehicles' driving through roundabouts. The driving state space, action space, and reward function are designed. The reward function considers safety, efficiency, comfort, and energy consumption to align with real-world requirements. All three tested DRL algorithms succeed in enabling automated vehicles to drive through the roundabout. To holistically evaluate the performance of these algorithms, this study establishes an evaluation methodology considering multiple indicators such as safety, efficiency, and comfort level. A method employing the Analytic Hierarchy Process is also developed to weigh these evaluation indicators. Experimental results on various testing scenarios reveal that the TRPO algorithm outperforms DDPG and PPO in terms of safety and efficiency, and PPO performs best in terms of comfort level. Lastly, to verify the model's adaptability and robustness regarding other driving scenarios, this study also deploys the model trained by TRPO to a range of different testing scenarios, e.g., highway driving and merging. Experimental results demonstrate that the TRPO model trained on only roundabout driving scenarios exhibits a certain degree of proficiency in highway driving and merging scenarios. This study provides a foundation for the application of automated driving with DRL in real traffic environments.
Driver-Specific Risk Recognition in Interactive Driving Scenarios using Graph Representation
Nov 11, 2021
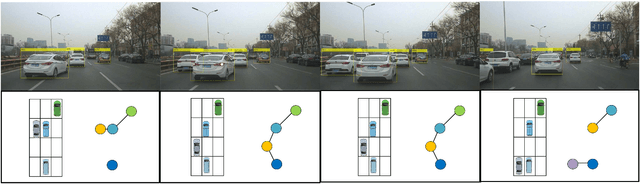


This paper presents a driver-specific risk recognition framework for autonomous vehicles that can extract inter-vehicle interactions. This extraction is carried out for urban driving scenarios in a driver-cognitive manner to improve the recognition accuracy of risky scenes. First, clustering analysis is applied to the operation data of drivers for learning the subjective assessment of risky scenes of different drivers and generating the corresponding risk label for each scene. Second, the graph representation model (GRM) is adopted to unify and construct the features of dynamic vehicles, inter-vehicle interactions and static traffic markings in real driving scenes into graphs. The driver-specific risk label provides ground truth to capture the risk evaluation criteria of different drivers. In addition, the graph model represents multiple features of the driving scenes. Therefore, the proposed framework can learn the risk-evaluating pattern of driving scenes of different drivers and establish driver-specific risk identifiers. Last, the performance of the proposed framework is evaluated via experiments conducted using real-world urban driving datasets collected by multiple drivers. The results show that the risks and their levels in real driving environments can be accurately recognized by the proposed framework.