 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Anomaly Detection from Time-of-Flight Depth Images
Apr 12, 2022
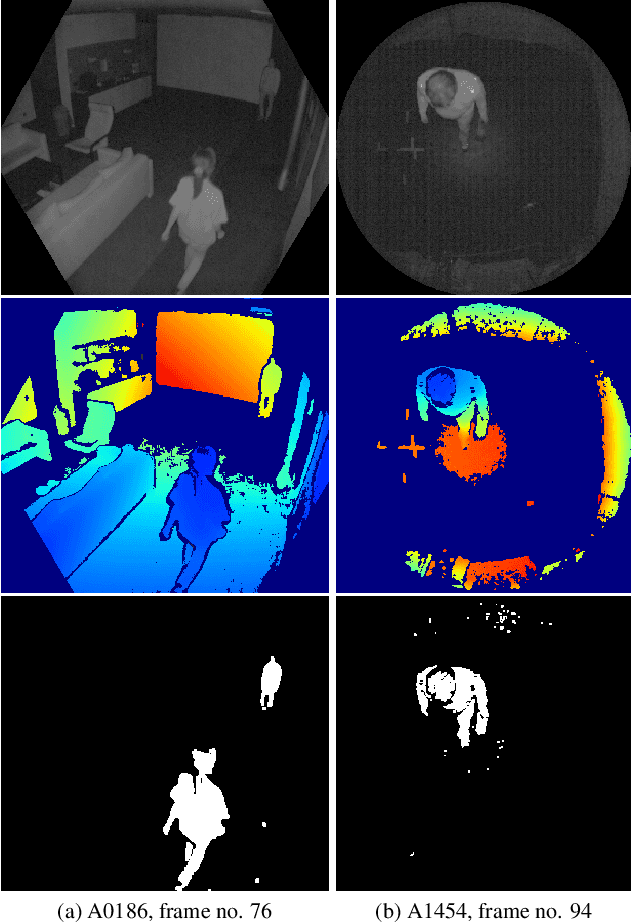
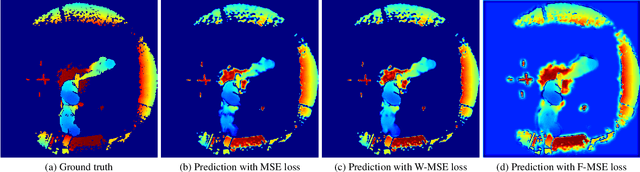
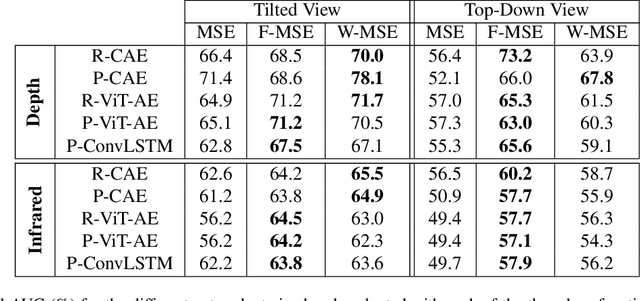
Video anomaly detection (VAD) addresses the problem of automatically finding anomalous events in video data. The primary data modalities on which current VAD systems work on are monochrome or RGB images. Using depth data in this context instead is still hardly explored in spite of depth images being a popular choice in many other computer vision research areas and the increasing availability of inexpensive depth camera hardware. We evaluate the application of existing autoencoder-based methods on depth video and propose how the advantages of using depth data can be leveraged by integration into the loss function. Training is done unsupervised using normal sequences without need for any additional annotations. We show that depth allows easy extraction of auxiliary information for scene analysis in the form of a foreground mask and demonstrate its beneficial effect on the anomaly detection performance through evaluation on a large public dataset, for which we are also the first ones to present results on.
TIMo -- A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera
Aug 27, 2021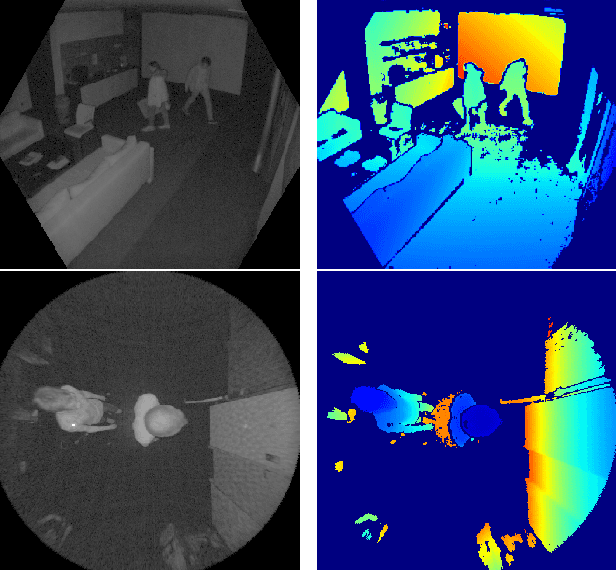
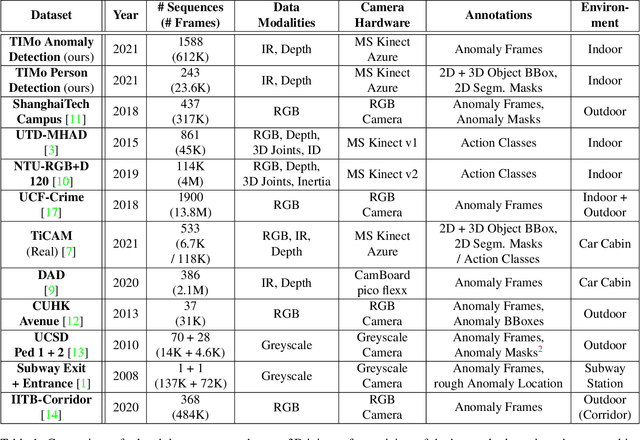
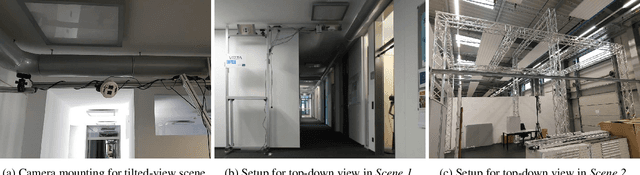
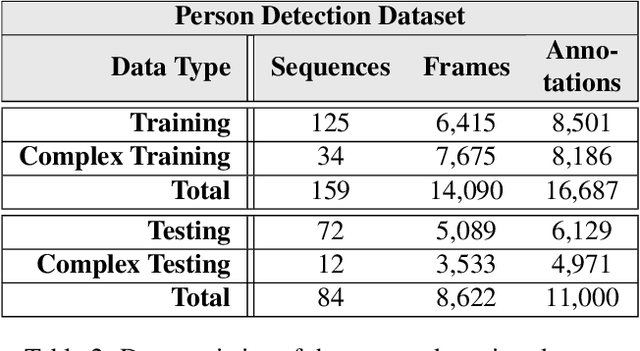
We present TIMo (Time-of-flight Indoor Monitoring), a dataset for video-based monitoring of indoor spaces captured using a time-of-flight (ToF) camera. The resulting depth videos feature people performing a set of different predefined actions, for which we provide detailed annotations. Person detection for people counting and anomaly detection are the two targeted applications. Most existing surveillance video datasets provide either grayscale or RGB videos. Depth information, on the other hand, is still a rarity in this class of datasets in spite of being popular and much more common in other research fields within computer vision. Our dataset addresses this gap in the landscape of surveillance video datasets. The recordings took place at two different locations with the ToF camera set up either in a top-down or a tilted perspective on the scene. The dataset is publicly available at https://vizta-tof.kl.dfki.de/timo-dataset-overview/.
Gesture Recognition in RGB Videos UsingHuman Body Keypoints and Dynamic Time Warping
Jun 25, 2019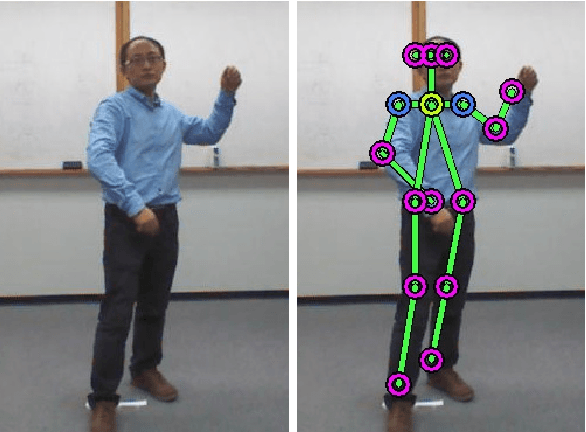


Gesture recognition opens up new ways for humans to intuitively interact with machines. Especially for service robots, gestures can be a valuable addition to the means of communication to, for example, draw the robot's attention to someone or something. Extracting a gesture from video data and classifying it is a challenging task and a variety of approaches have been proposed throughout the years. This paper presents a method for gesture recognition in RGB videos using OpenPose to extract the pose of a person and Dynamic Time Warping (DTW) in conjunction with One-Nearest-Neighbor (1NN) for time-series classification. The main features of this approach are the independence of any specific hardware and high flexibility, because new gestures can be added to the classifier by adding only a few examples of it. We utilize the robustness of the Deep Learning-based OpenPose framework while avoiding the data-intensive task of training a neural network ourselves. We demonstrate the classification performance of our method using a public dataset.