 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTIMo -- A Dataset for Indoor Building Monitoring with a Time-of-Flight Camera
Aug 27, 2021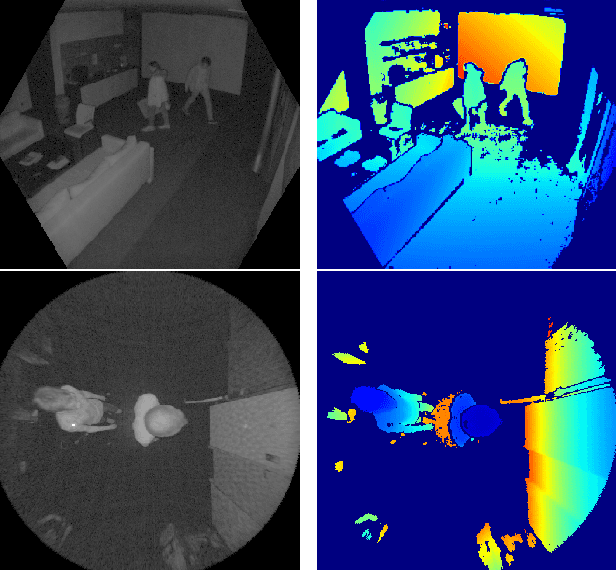
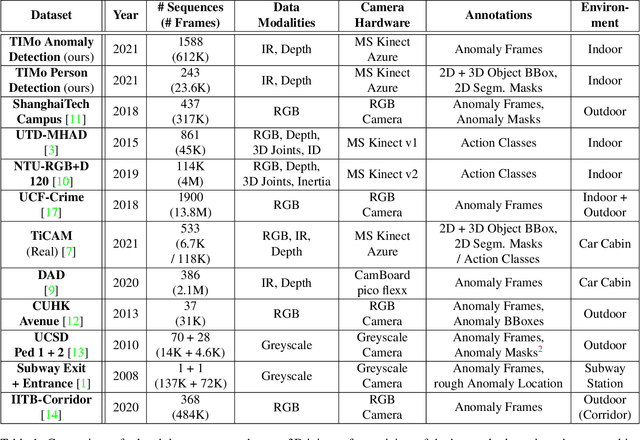
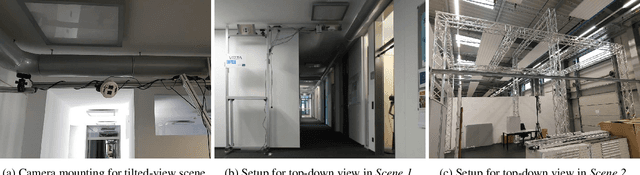
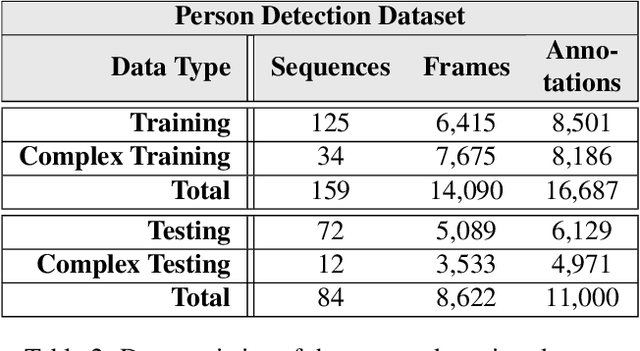
We present TIMo (Time-of-flight Indoor Monitoring), a dataset for video-based monitoring of indoor spaces captured using a time-of-flight (ToF) camera. The resulting depth videos feature people performing a set of different predefined actions, for which we provide detailed annotations. Person detection for people counting and anomaly detection are the two targeted applications. Most existing surveillance video datasets provide either grayscale or RGB videos. Depth information, on the other hand, is still a rarity in this class of datasets in spite of being popular and much more common in other research fields within computer vision. Our dataset addresses this gap in the landscape of surveillance video datasets. The recordings took place at two different locations with the ToF camera set up either in a top-down or a tilted perspective on the scene. The dataset is publicly available at https://vizta-tof.kl.dfki.de/timo-dataset-overview/.
Calibration and Auto-Refinement for Light Field Cameras
Jun 11, 2021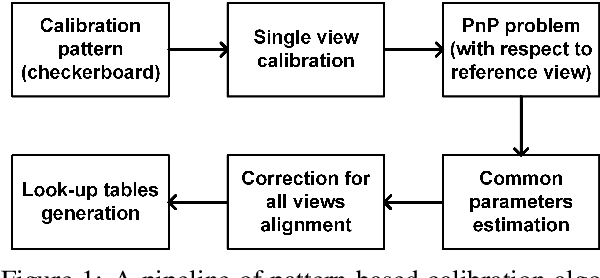
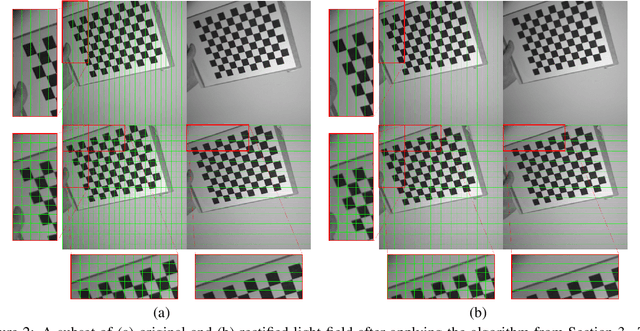
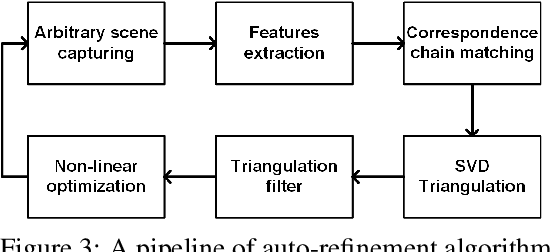
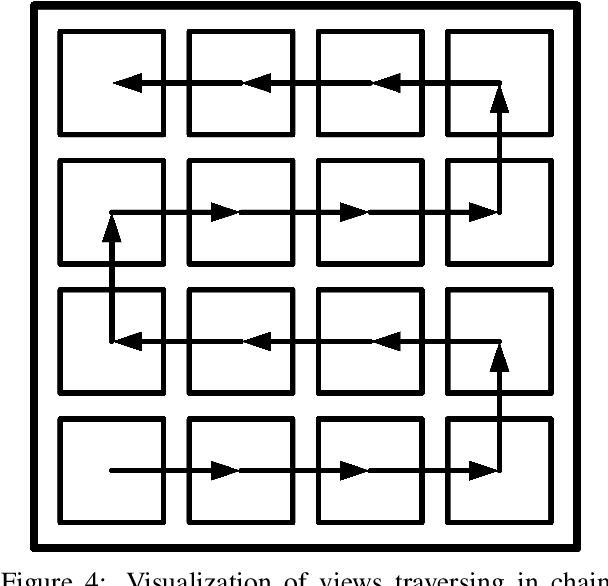
The ability to create an accurate three-dimensional reconstruction of a captured scene draws attention to the principles of light fields. This paper presents an approach for light field camera calibration and rectification, based on pairwise pattern-based parameters extraction. It is followed by a correspondence-based algorithm for camera parameters refinement from arbitrary scenes using the triangulation filter and nonlinear optimization. The effectiveness of our approach is validated on both real and synthetic data.
Rapid Light Field Depth Estimation with Semi-Global Matching
Jul 31, 2019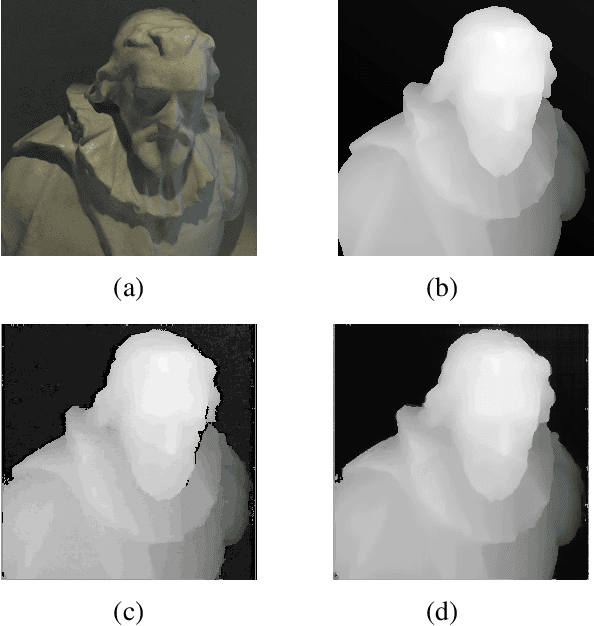
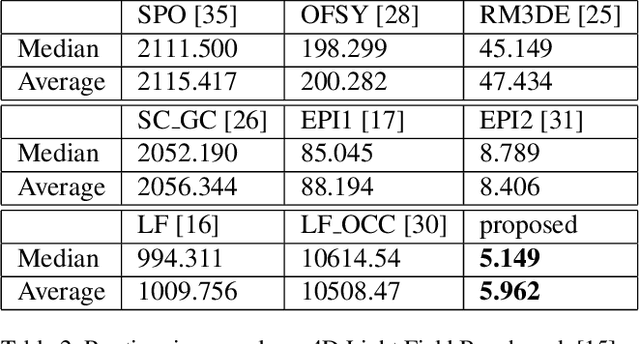
Running time of the light field depth estimation algorithms is typically high. This assessment is based on the computational complexity of existing methods and the large amounts of data involved. The aim of our work is to develop a simple and fast algorithm for accurate depth computation. In this context, we propose an approach, which involves Semi-Global Matching for the processing of light field images. It forms on comparison of pixels' correspondences with different metrics in the substantially bounded light field space. We show that our method is suitable for the fast production of a proper result in a variety of light field configurations
A Compact Light Field Camera for Real-Time Depth Estimation
Jul 25, 2019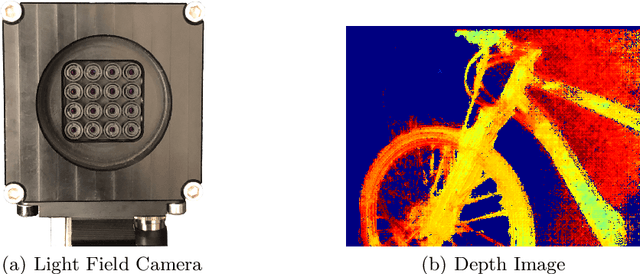
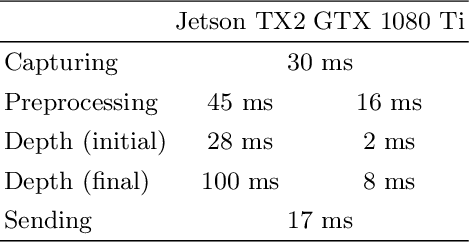

Depth cameras are utilized in many applications. Recently light field approaches are increasingly being used for depth computation. While these approaches demonstrate the technical feasibility, they can not be brought into real-world application, since they have both a high computation time as well as a large design. Exactly these two drawbacks are overcome in this paper. For the first time, we present a depth camera based on the light field principle, which provides real-time depth information as well as a compact design.
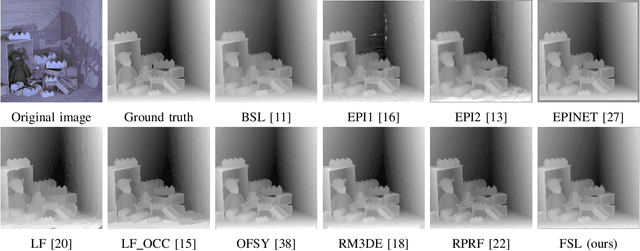
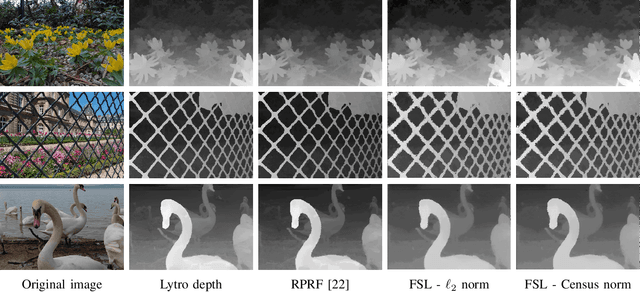
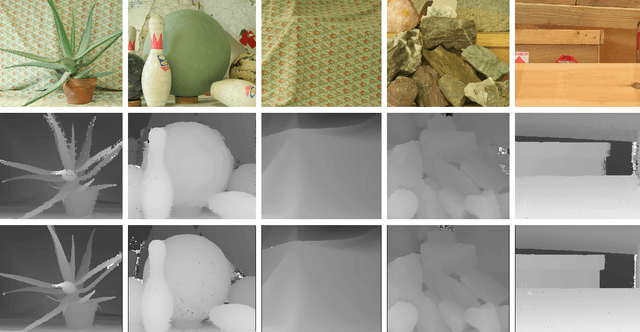
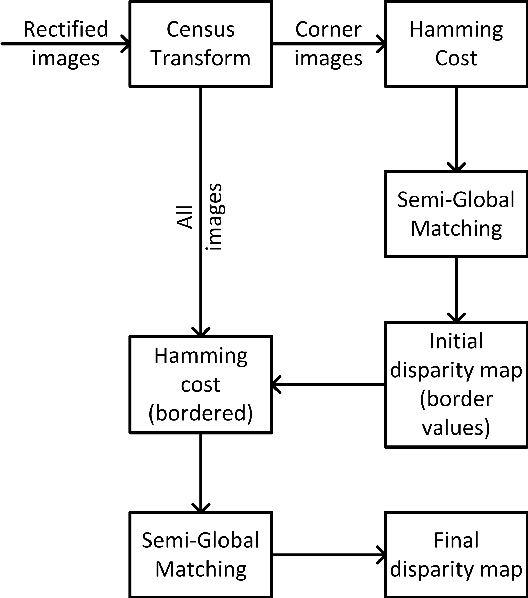
Fast and Efficient Depth Map Estimation from Light Fields
May 01, 2018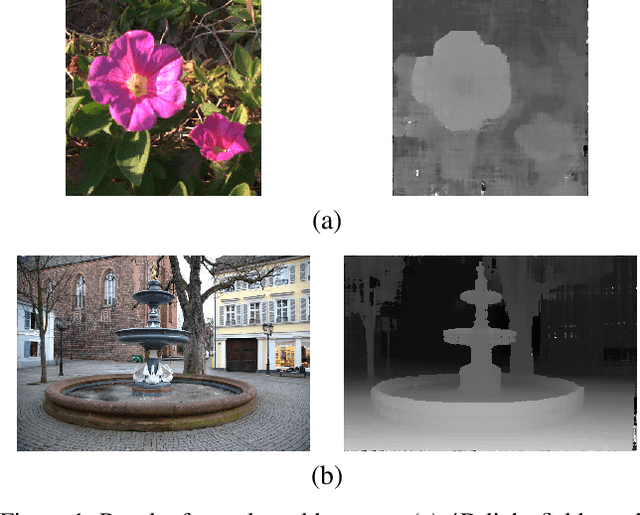
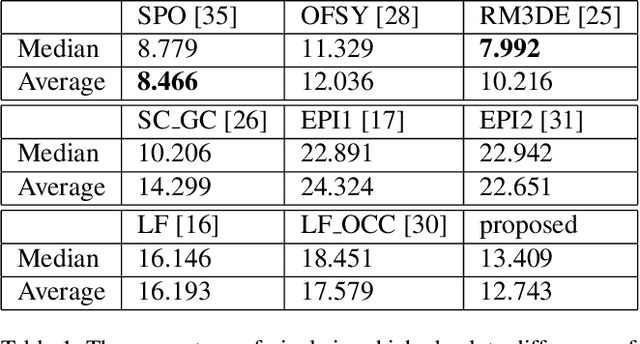
The paper presents an algorithm for depth map estimation from the light field images in relatively small amount of time, using only single thread on CPU. The proposed method improves existing principle of line fitting in 4-dimensional light field space. Line fitting is based on color values comparison using kernel density estimation. Our method utilizes result of Semi-Global Matching (SGM) with Census transform-based matching cost as a border initialization for line fitting. It provides a significant reduction of computations needed to find the best depth match. With the suggested evaluation metric we show that proposed method is applicable for efficient depth map estimation while preserving low computational time compared to others.