Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibration and Auto-Refinement for Light Field Cameras
Paper and Code
Jun 11, 2021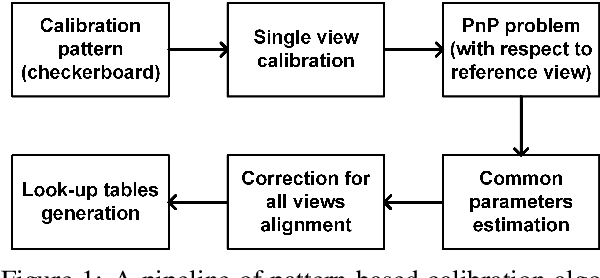
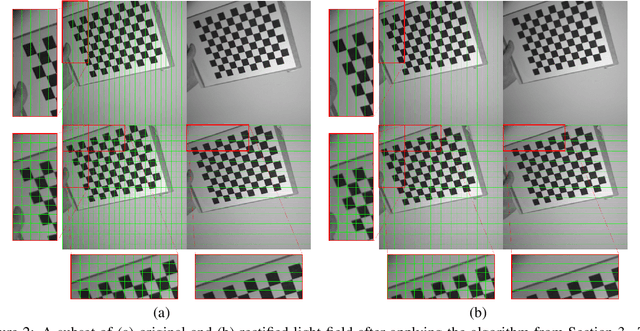
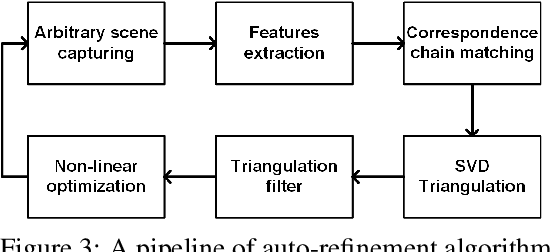
The ability to create an accurate three-dimensional reconstruction of a captured scene draws attention to the principles of light fields. This paper presents an approach for light field camera calibration and rectification, based on pairwise pattern-based parameters extraction. It is followed by a correspondence-based algorithm for camera parameters refinement from arbitrary scenes using the triangulation filter and nonlinear optimization. The effectiveness of our approach is validated on both real and synthetic data.
* Presented on 29. International Conference on Computer Graphics,
Visualization and Computer Vision 2021 (WSCG 2021)
View paper on