 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBe Considerate: Objectives, Side Effects, and Deciding How to Act
Jun 04, 2021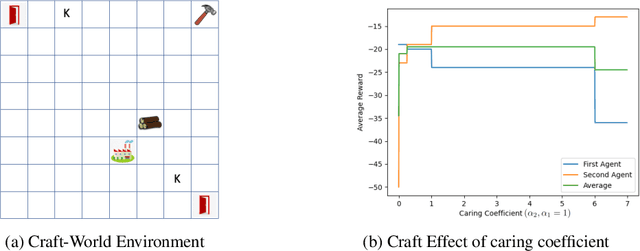
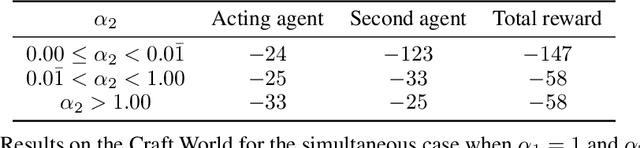
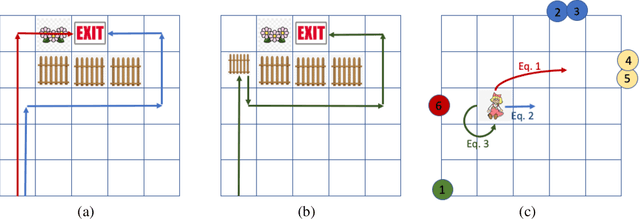
Recent work in AI safety has highlighted that in sequential decision making, objectives are often underspecified or incomplete. This gives discretion to the acting agent to realize the stated objective in ways that may result in undesirable outcomes. We contend that to learn to act safely, a reinforcement learning (RL) agent should include contemplation of the impact of its actions on the wellbeing and agency of others in the environment, including other acting agents and reactive processes. We endow RL agents with the ability to contemplate such impact by augmenting their reward based on expectation of future return by others in the environment, providing different criteria for characterizing impact. We further endow these agents with the ability to differentially factor this impact into their decision making, manifesting behavior that ranges from self-centred to self-less, as demonstrated by experiments in gridworld environments.
Formal Methods with a Touch of Magic
May 25, 2020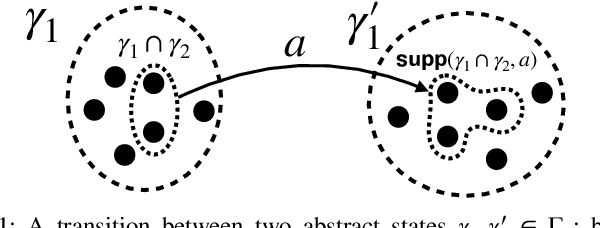
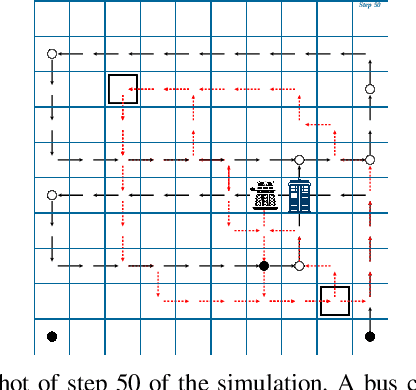
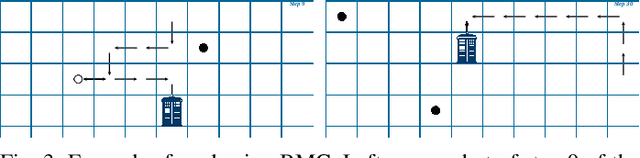
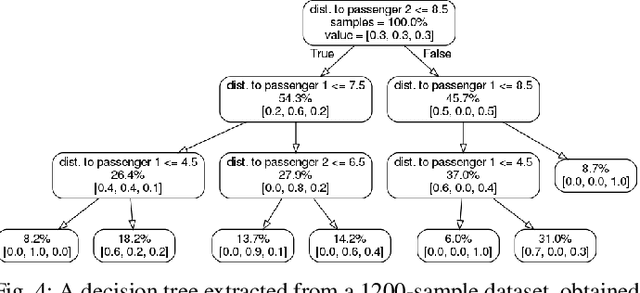
Machine learning and formal methods have complimentary benefits and drawbacks. In this work, we address the controller-design problem with a combination of techniques from both fields. The use of black-box neural networks in deep reinforcement learning (deep RL) poses a challenge for such a combination. Instead of reasoning formally about the output of deep RL, which we call the {\em wizard}, we extract from it a decision-tree based model, which we refer to as the {\em magic book}. Using the extracted model as an intermediary, we are able to handle problems that are infeasible for either deep RL or formal methods by themselves. First, we suggest, for the first time, combining a magic book in a synthesis procedure. We synthesize a stand-alone correct-by-design controller that enjoys the favorable performance of RL. Second, we incorporate a magic book in a bounded model checking (BMC) procedure. BMC allows us to find numerous traces of the plant under the control of the wizard, which a user can use to increase the trustworthiness of the wizard and direct further training.