 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransient Fault Tolerant Semantic Segmentation for Autonomous Driving
Aug 30, 2024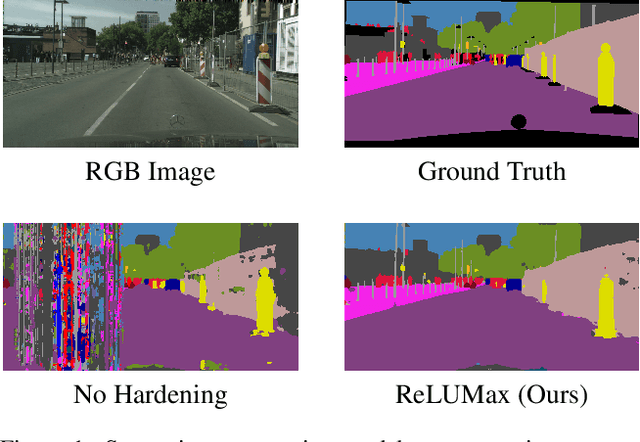
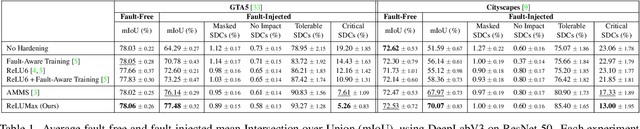
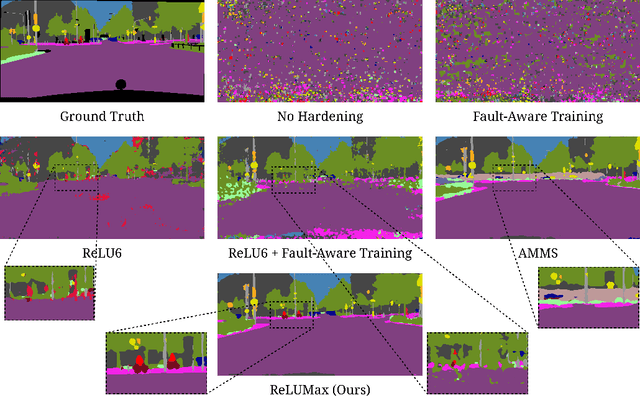

Deep learning models are crucial for autonomous vehicle perception, but their reliability is challenged by algorithmic limitations and hardware faults. We address the latter by examining fault-tolerance in semantic segmentation models. Using established hardware fault models, we evaluate existing hardening techniques both in terms of accuracy and uncertainty and introduce ReLUMax, a novel simple activation function designed to enhance resilience against transient faults. ReLUMax integrates seamlessly into existing architectures without time overhead. Our experiments demonstrate that ReLUMax effectively improves robustness, preserving performance and boosting prediction confidence, thus contributing to the development of reliable autonomous driving systems.
Fault-Aware Design and Training to Enhance DNNs Reliability with Zero-Overhead
May 28, 2022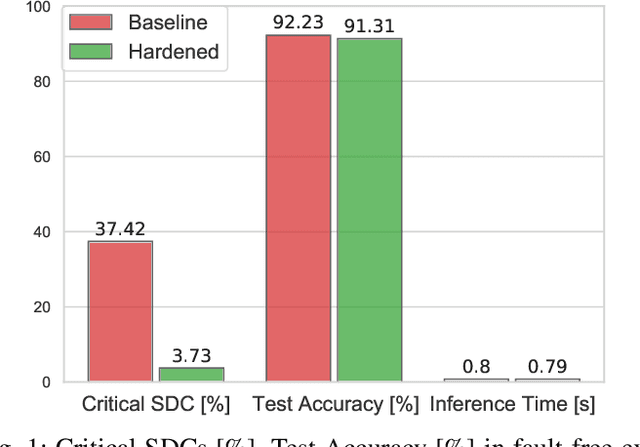
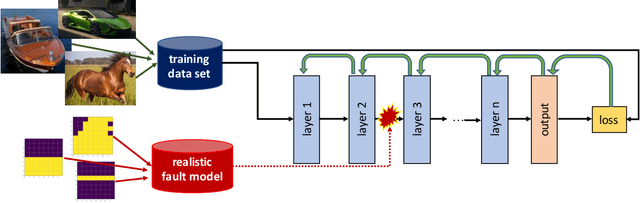
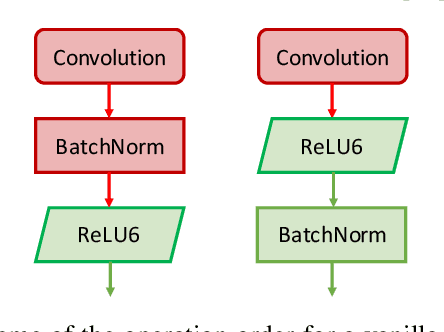
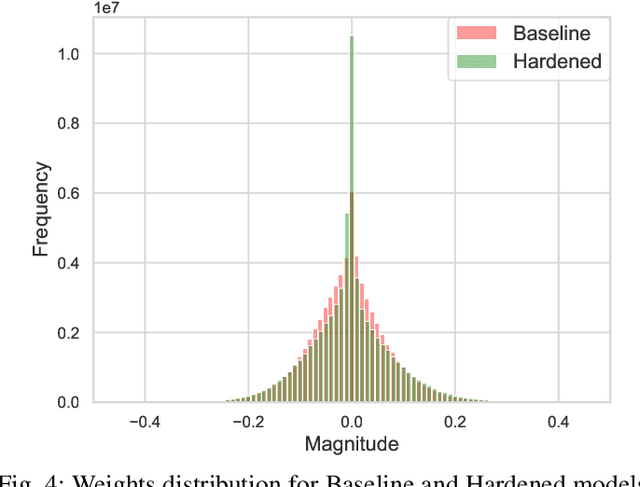
Deep Neural Networks (DNNs) enable a wide series of technological advancements, ranging from clinical imaging, to predictive industrial maintenance and autonomous driving. However, recent findings indicate that transient hardware faults may corrupt the models prediction dramatically. For instance, the radiation-induced misprediction probability can be so high to impede a safe deployment of DNNs models at scale, urging the need for efficient and effective hardening solutions. In this work, we propose to tackle the reliability issue both at training and model design time. First, we show that vanilla models are highly affected by transient faults, that can induce a performances drop up to 37%. Hence, we provide three zero-overhead solutions, based on DNN re-design and re-train, that can improve DNNs reliability to transient faults up to one order of magnitude. We complement our work with extensive ablation studies to quantify the gain in performances of each hardening component.