 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobile Manipulation with Active Inference for Long-Horizon Rearrangement Tasks
Jul 23, 2025Despite growing interest in active inference for robotic control, its application to complex, long-horizon tasks remains untested. We address this gap by introducing a fully hierarchical active inference architecture for goal-directed behavior in realistic robotic settings. Our model combines a high-level active inference model that selects among discrete skills realized via a whole-body active inference controller. This unified approach enables flexible skill composition, online adaptability, and recovery from task failures without requiring offline training. Evaluated on the Habitat Benchmark for mobile manipulation, our method outperforms state-of-the-art baselines across the three long-horizon tasks, demonstrating for the first time that active inference can scale to the complexity of modern robotics benchmarks.
The Free Energy Principle for Perception and Action: A Deep Learning Perspective
Jul 13, 2022



The free energy principle, and its corollary active inference, constitute a bio-inspired theory that assumes biological agents act to remain in a restricted set of preferred states of the world, i.e., they minimize their free energy. Under this principle, biological agents learn a generative model of the world and plan actions in the future that will maintain the agent in an homeostatic state that satisfies its preferences. This framework lends itself to being realized in silico, as it comprehends important aspects that make it computationally affordable, such as variational inference and amortized planning. In this work, we investigate the tool of deep learning to design and realize artificial agents based on active inference, presenting a deep-learning oriented presentation of the free energy principle, surveying works that are relevant in both machine learning and active inference areas, and discussing the design choices that are involved in the implementation process. This manuscript probes newer perspectives for the active inference framework, grounding its theoretical aspects into more pragmatic affairs, offering a practical guide to active inference newcomers and a starting point for deep learning practitioners that would like to investigate implementations of the free energy principle.
LatentSLAM: unsupervised multi-sensor representation learning for localization and mapping
May 07, 2021
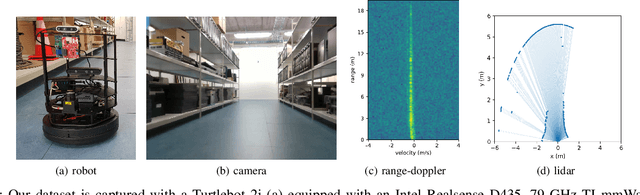

Biologically inspired algorithms for simultaneous localization and mapping (SLAM) such as RatSLAM have been shown to yield effective and robust robot navigation in both indoor and outdoor environments. One drawback however is the sensitivity to perceptual aliasing due to the template matching of low-dimensional sensory templates. In this paper, we propose an unsupervised representation learning method that yields low-dimensional latent state descriptors that can be used for RatSLAM. Our method is sensor agnostic and can be applied to any sensor modality, as we illustrate for camera images, radar range-doppler maps and lidar scans. We also show how combining multiple sensors can increase the robustness, by reducing the number of false matches. We evaluate on a dataset captured with a mobile robot navigating in a warehouse-like environment, moving through different aisles with similar appearance, making it hard for the SLAM algorithms to disambiguate locations.
A learning gap between neuroscience and reinforcement learning
May 04, 2021



Historically, artificial intelligence has drawn much inspiration from neuroscience to fuel advances in the field. However, current progress in reinforcement learning is largely focused on benchmark problems that fail to capture many of the aspects that are of interest in neuroscience today. We illustrate this point by extending a T-maze task from neuroscience for use with reinforcement learning algorithms, and show that state-of-the-art algorithms are not capable of solving this problem. Finally, we point out where insights from neuroscience could help explain some of the issues encountered.
Deep Active Inference for Autonomous Robot Navigation
Mar 06, 2020



Active inference is a theory that underpins the way biological agent's perceive and act in the real world. At its core, active inference is based on the principle that the brain is an approximate Bayesian inference engine, building an internal generative model to drive agents towards minimal surprise. Although this theory has shown interesting results with grounding in cognitive neuroscience, its application remains limited to simulations with small, predefined sensor and state spaces. In this paper, we leverage recent advances in deep learning to build more complex generative models that can work without a predefined states space. State representations are learned end-to-end from real-world, high-dimensional sensory data such as camera frames. We also show that these generative models can be used to engage in active inference. To the best of our knowledge this is the first application of deep active inference for a real-world robot navigation task.
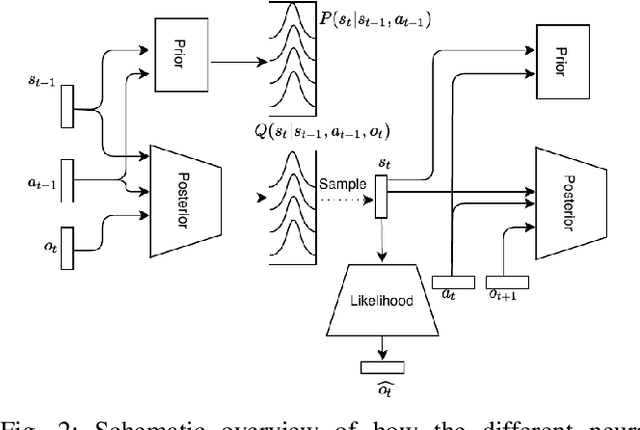
Learning Perception and Planning with Deep Active Inference
Feb 24, 2020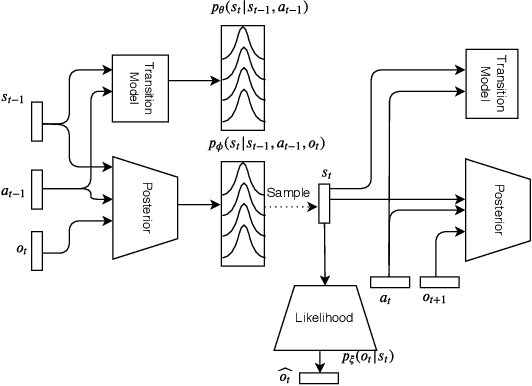
Active inference is a process theory of the brain that states that all living organisms infer actions in order to minimize their (expected) free energy. However, current experiments are limited to predefined, often discrete, state spaces. In this paper we use recent advances in deep learning to learn the state space and approximate the necessary probability distributions to engage in active inference.
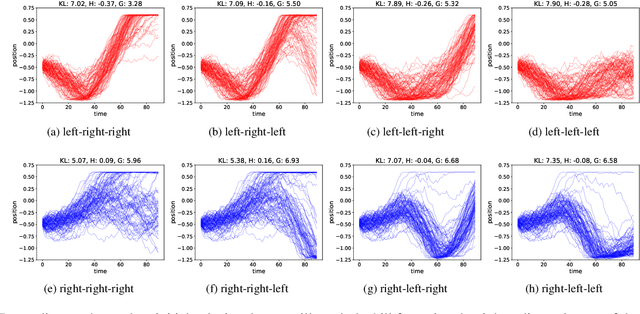
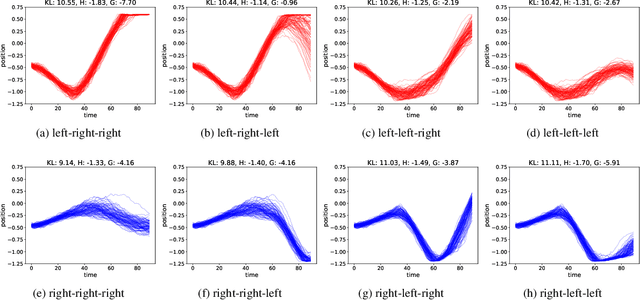
Learning to Catch Piglets in Flight
Jan 28, 2020
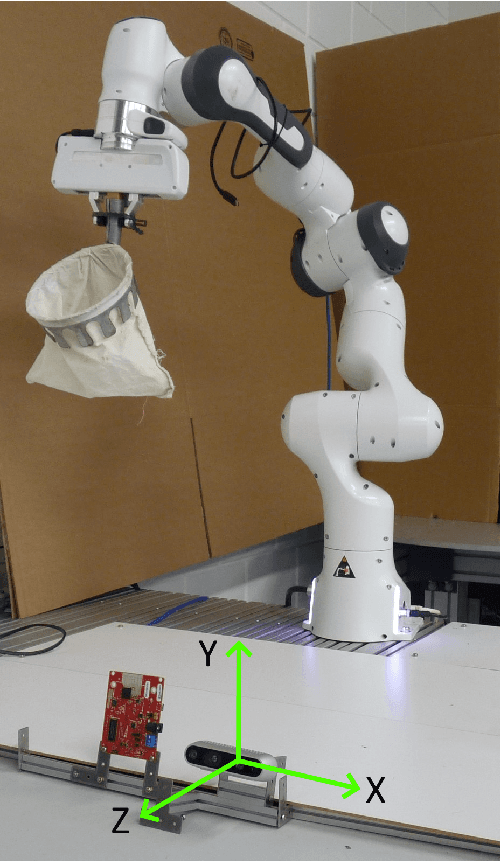
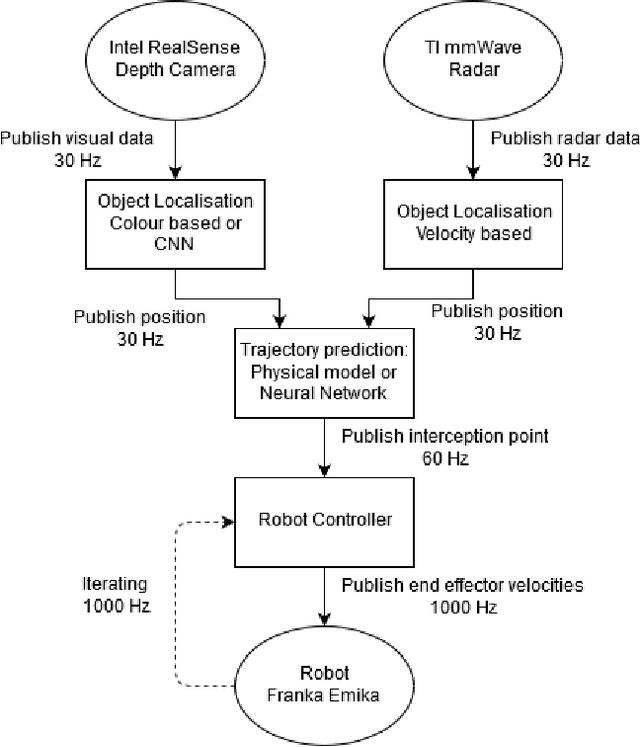
Catching objects in-flight is an outstanding challenge in robotics. In this paper, we present a closed-loop control system fusing data from two sensor modalities: an RGB-D camera and a radar. To develop and test our method, we start with an easy to identify object: a stuffed Piglet. We implement and compare two approaches to detect and track the object, and to predict the interception point. A baseline model uses colour filtering for locating the thrown object in the environment, while the interception point is predicted using a least squares regression over the physical ballistic trajectory equations. A deep learning based method uses artificial neural networks for both object detection and interception point prediction. We show that we are able to successfully catch Piglet in 80% of the cases with our deep learning approach.
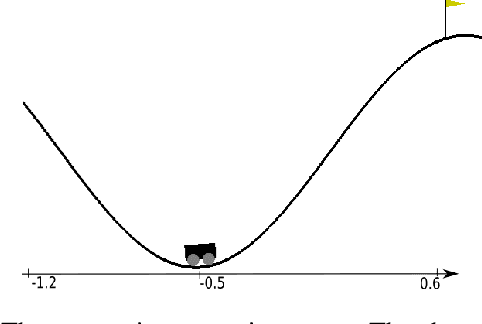
Bayesian policy selection using active inference
Apr 25, 2019
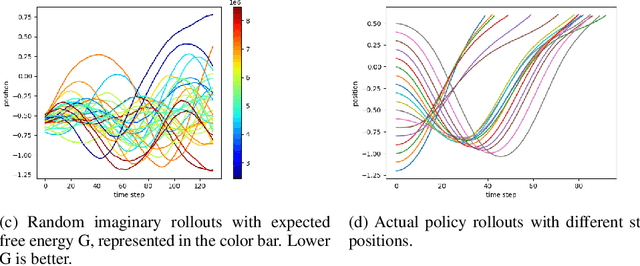
Learning to take actions based on observations is a core requirement for artificial agents to be able to be successful and robust at their task. Reinforcement Learning (RL) is a well-known technique for learning such policies. However, current RL algorithms often have to deal with reward shaping, have difficulties generalizing to other environments and are most often sample inefficient. In this paper, we explore active inference and the free energy principle, a normative theory from neuroscience that explains how self-organizing biological systems operate by maintaining a model of the world and casting action selection as an inference problem. We apply this concept to a typical problem known to the RL community, the mountain car problem, and show how active inference encompasses both RL and learning from demonstrations.