 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperDrive: Enhancing Driving Decisions Through Cooperative Perception
Apr 15, 2026Autonomous vehicles equipped with robust onboard perception, localization, and planning still face limitations in occlusion and non-line-of-sight (NLOS) scenarios, where delayed reactions can increase collision risk. We propose CooperDrive, a cooperative perception framework that augments situational awareness and enables earlier, safer driving decisions. CooperDrive offers two key advantages: (i) each vehicle retains its native perception, localization, and planning stack, and (ii) a lightweight object-level sharing and fusion strategy bridges perception and planning. Specifically, CooperDrive reuses detector Bird's-Eye View (BEV) features to estimate accurate vehicle poses without additional heavy encoders, thereby reconstructing BEV representations and feeding the planner with low latency. On the planning side, CooperDrive leverages the expanded object set to anticipate potential conflicts earlier and adjust speed and trajectory proactively, thereby transforming reactive behaviors into predictive and safer driving decisions. Real-world closed-loop tests at occlusion-heavy NLOS intersections demonstrate that CooperDrive increases reaction lead time, minimum time-to-collision (TTC), and stopping margin, while requiring only 90 kbps bandwidth and maintaining an average end-to-end latency of 89 ms.
GreenAuto: An Automated Platform for Sustainable AI Model Design on Edge Devices
Jan 25, 2025
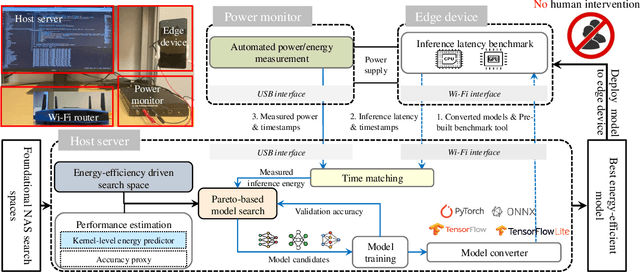
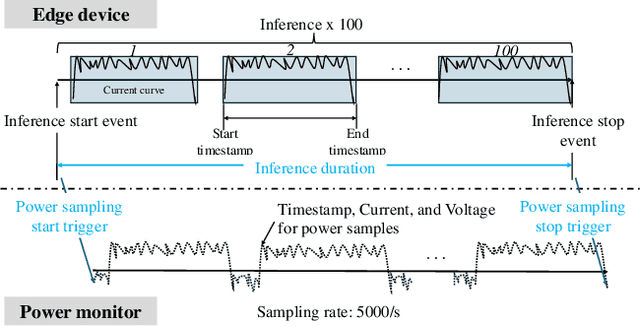
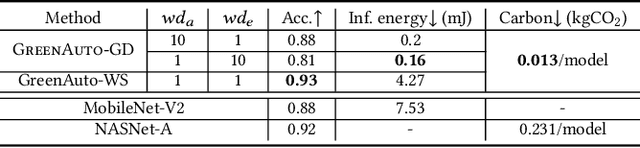
We present GreenAuto, an end-to-end automated platform designed for sustainable AI model exploration, generation, deployment, and evaluation. GreenAuto employs a Pareto front-based search method within an expanded neural architecture search (NAS) space, guided by gradient descent to optimize model exploration. Pre-trained kernel-level energy predictors estimate energy consumption across all models, providing a global view that directs the search toward more sustainable solutions. By automating performance measurements and iteratively refining the search process, GreenAuto demonstrates the efficient identification of sustainable AI models without the need for human intervention.
Unveiling Energy Efficiency in Deep Learning: Measurement, Prediction, and Scoring across Edge Devices
Oct 19, 2023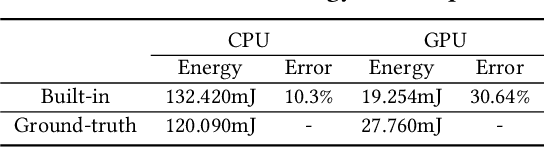

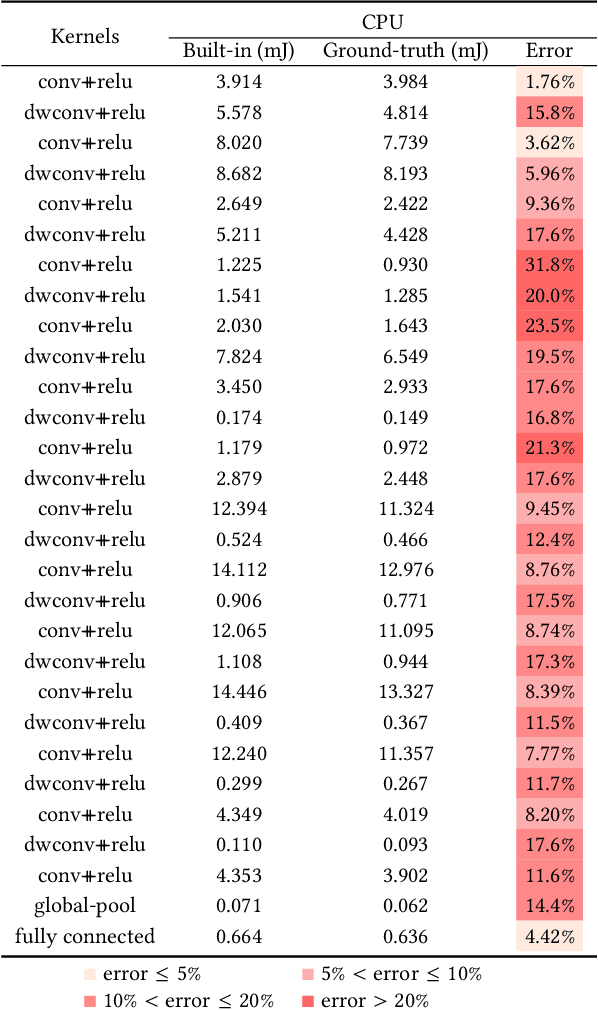
Today, deep learning optimization is primarily driven by research focused on achieving high inference accuracy and reducing latency. However, the energy efficiency aspect is often overlooked, possibly due to a lack of sustainability mindset in the field and the absence of a holistic energy dataset. In this paper, we conduct a threefold study, including energy measurement, prediction, and efficiency scoring, with an objective to foster transparency in power and energy consumption within deep learning across various edge devices. Firstly, we present a detailed, first-of-its-kind measurement study that uncovers the energy consumption characteristics of on-device deep learning. This study results in the creation of three extensive energy datasets for edge devices, covering a wide range of kernels, state-of-the-art DNN models, and popular AI applications. Secondly, we design and implement the first kernel-level energy predictors for edge devices based on our kernel-level energy dataset. Evaluation results demonstrate the ability of our predictors to provide consistent and accurate energy estimations on unseen DNN models. Lastly, we introduce two scoring metrics, PCS and IECS, developed to convert complex power and energy consumption data of an edge device into an easily understandable manner for edge device end-users. We hope our work can help shift the mindset of both end-users and the research community towards sustainability in edge computing, a principle that drives our research. Find data, code, and more up-to-date information at https://amai-gsu.github.io/DeepEn2023.
Software-Defined MIMO OFDM Joint Radar-Communication Platform with Fully Digital mmWave Architecture
Feb 11, 2023



Large-scale deployment of connected vehicles with cooperative sensing and maneuvering technologies increases the demand for vehicle-to-everything communication (V2X) band in 5.9 GHz. Besides the V2X spectrum, the under-utilized millimeter-wave (mmWave) bands at 24 and 77 GHz can be leveraged to supplement V2X communication and support high data rates for emerging broadband applications. For this purpose, joint radar-communication (JRC) systems have been proposed in the literature to perform both functions using the same waveform and hardware. In this work, we present a software-defined multiple-input and multiple-output (MIMO) JRC with orthogonal frequency division multiplexing (OFDM) for the 24 GHz mmWave band. We implement a real-time operating full-duplex JRC platform using commercially available software-defined radios and custom-built mmWave front-ends. With fully digital MIMO architecture, we demonstrate simultaneous data transmission and high-resolution radar imaging capabilities of MIMO OFDM JRC in the mmWave band.
Optimal Precoder Design for MIMO-OFDM-based Joint Automotive Radar-Communication Networks
Sep 25, 2021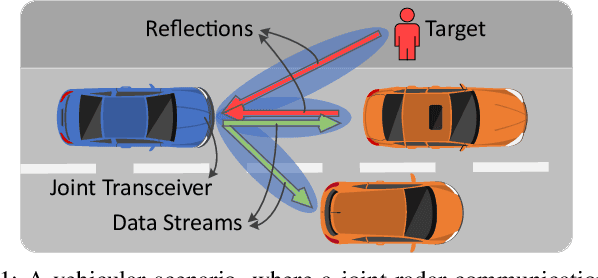
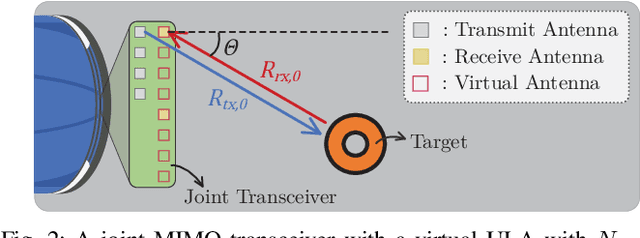
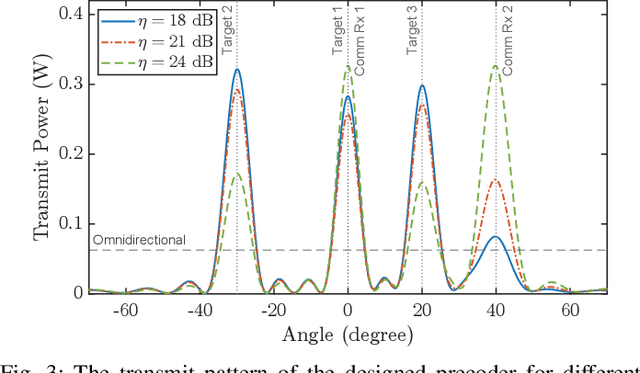
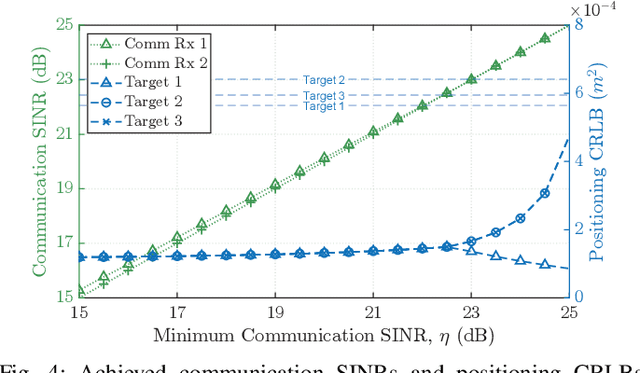
Large-scale deployment of connected vehicles with cooperative awareness technologies increases the demand for vehicle-to-everything (V2X) communication spectrum in 5.9 GHz that is mainly allocated for the exchange of safety messages. To supplement V2X communication and support the high data rates needed by broadband applications, the millimeter-wave (mmWave) automotive radar spectrum at 76-81 GHz can be utilized. For this purpose, joint radar-communication systems have been proposed in the literature to perform both functions using the same waveform and hardware. While multiple-input and multiple-output (MIMO) communication with multiple users enables independent data streaming for high throughput, MIMO radar processing provides high-resolution imaging that is crucial for safety-critical systems. However, employing conventional precoding methods designed for communication generates directional beams that impair MIMO radar imaging and target tracking capabilities during data streaming. In this paper, we propose a MIMO joint automotive radar-communication (JARC) framework based on orthogonal frequency division multiplexing (OFDM) waveform. First, we show that the MIMO-OFDM preamble can be exploited for both MIMO radar processing and estimation of the communication channel. Then, we propose an optimal precoder design method that enables high accuracy target tracking while transmitting independent data streams to multiple receivers. The proposed methods provide high-resolution radar imaging and high throughput capabilities for MIMO JARC networks. Finally, we evaluate the efficacy of the proposed methods through numerical simulations.
Cooperative Perception with Deep Reinforcement Learning for Connected Vehicles
Apr 23, 2020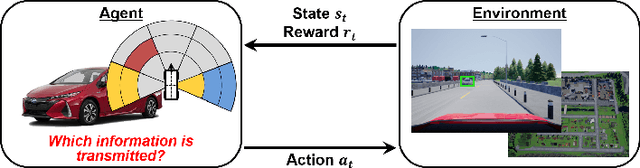



Sensor-based perception on vehicles are becoming prevalent and important to enhance the road safety. Autonomous driving systems use cameras, LiDAR, and radar to detect surrounding objects, while human-driven vehicles use them to assist the driver. However, the environmental perception by individual vehicles has the limitations on coverage and/or detection accuracy. For example, a vehicle cannot detect objects occluded by other moving/static obstacles. In this paper, we present a cooperative perception scheme with deep reinforcement learning to enhance the detection accuracy for the surrounding objects. By using the deep reinforcement learning to select the data to transmit, our scheme mitigates the network load in vehicular communication networks and enhances the communication reliability. To design, test, and verify the cooperative perception scheme, we develop a Cooperative & Intelligent Vehicle Simulation (CIVS) Platform, which integrates three software components: traffic simulator, vehicle simulator, and object classifier. We evaluate that our scheme decreases packet loss and thereby increases the detection accuracy by up to 12%, compared to the baseline protocol.