 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCherry Yield Forecast: Harvest Prediction for Individual Sweet Cherry Trees
Mar 26, 2025



This paper is part of a publication series from the For5G project that has the goal of creating digital twins of sweet cherry trees. At the beginning a brief overview of the revious work in this project is provided. Afterwards the focus shifts to a crucial problem in the fruit farming domain: the difficulty of making reliable yield predictions early in the season. Following three Satin sweet cherry trees along the year 2023 enabled the collection of accurate ground truth data about the development of cherries from dormancy until harvest. The methodology used to collect this data is presented, along with its valuation and visualization. The predictive power of counting objects at all relevant vegetative stages of the fruit development cycle in cherry trees with regards to yield predictions is investigated. It is found that all investigated fruit states are suitable for yield predictions based on linear regression. Conceptionally, there is a trade-off between earliness and external events with the potential to invalidate the prediction. Considering this, two optimal timepoints are suggested that are opening cluster stage before the start of the flowering and the early fruit stage right after the second fruit drop. However, both timepoints are challenging to solve with automated procedures based on image data. Counting developing cherries based on images is exceptionally difficult due to the small fruit size and their tendency to be occluded by leaves. It was not possible to obtain satisfying results relying on a state-of-the-art fruit-counting method. Counting the elements within a bursting bud is also challenging, even when using high resolution cameras. It is concluded that accurate yield prediction for sweet cherry trees is possible when objects are manually counted and that automated features extraction with similar accuracy remains an open problem yet to be solved.
CherryPicker: Semantic Skeletonization and Topological Reconstruction of Cherry Trees
Apr 10, 2023



In plant phenotyping, accurate trait extraction from 3D point clouds of trees is still an open problem. For automatic modeling and trait extraction of tree organs such as blossoms and fruits, the semantically segmented point cloud of a tree and the tree skeleton are necessary. Therefore, we present CherryPicker, an automatic pipeline that reconstructs photo-metric point clouds of trees, performs semantic segmentation and extracts their topological structure in form of a skeleton. Our system combines several state-of-the-art algorithms to enable automatic processing for further usage in 3D-plant phenotyping applications. Within this pipeline, we present a method to automatically estimate the scale factor of a monocular reconstruction to overcome scale ambiguity and obtain metrically correct point clouds. Furthermore, we propose a semantic skeletonization algorithm build up on Laplacian-based contraction. We also show by weighting different tree organs semantically, our approach can effectively remove artifacts induced by occlusion and structural size variations. CherryPicker obtains high-quality topology reconstructions of cherry trees with precise details.
Effect of Superpixel Aggregation on Explanations in LIME -- A Case Study with Biological Data
Oct 17, 2019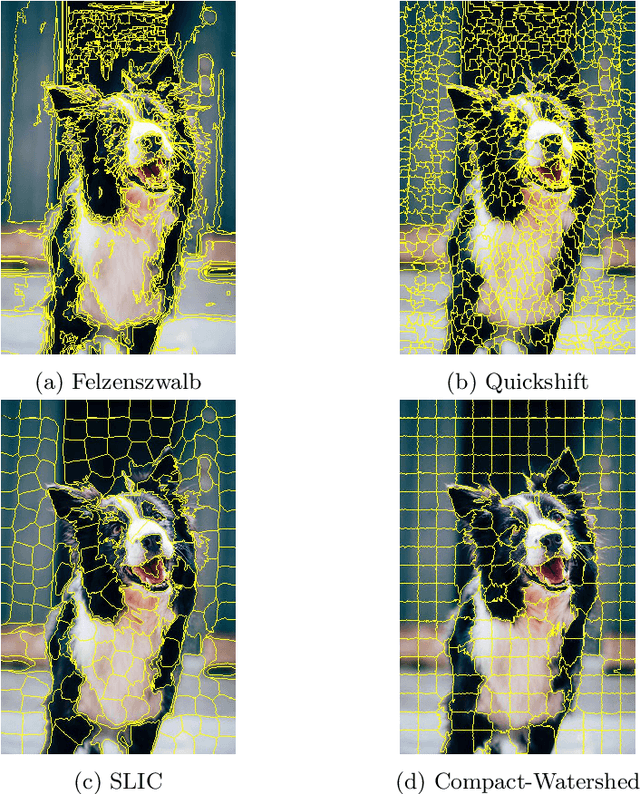
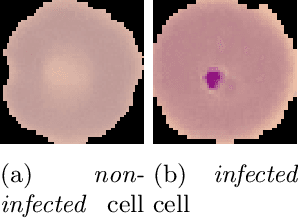
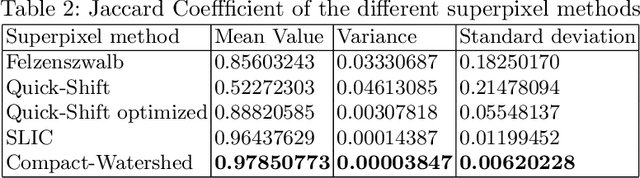
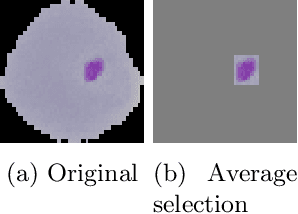
End-to-end learning with deep neural networks, such as convolutional neural networks (CNNs), has been demonstrated to be very successful for different tasks of image classification. To make decisions of black-box approaches transparent, different solutions have been proposed. LIME is an approach to explainable AI relying on segmenting images into superpixels based on the Quick-Shift algorithm. In this paper, we present an explorative study of how different superpixel methods, namely Felzenszwalb, SLIC and Compact-Watershed, impact the generated visual explanations. We compare the resulting relevance areas with the image parts marked by a human reference. Results show that image parts selected as relevant strongly vary depending on the applied method. Quick-Shift resulted in the least and Compact-Watershed in the highest correspondence with the reference relevance areas.
Multi-Robot Organisms: State of the Art
Aug 29, 2011



This paper represents the state of the art development on the field of artificial multi-robot organisms. It briefly considers mechatronic development, sensor and computational equipment, software framework and introduces one of the Grand Challenges for swarm and reconfigurable robotics.