 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpot-Compose: A Framework for Open-Vocabulary Object Retrieval and Drawer Manipulation in Point Clouds
Apr 18, 2024In recent years, modern techniques in deep learning and large-scale datasets have led to impressive progress in 3D instance segmentation, grasp pose estimation, and robotics. This allows for accurate detection directly in 3D scenes, object- and environment-aware grasp prediction, as well as robust and repeatable robotic manipulation. This work aims to integrate these recent methods into a comprehensive framework for robotic interaction and manipulation in human-centric environments. Specifically, we leverage 3D reconstructions from a commodity 3D scanner for open-vocabulary instance segmentation, alongside grasp pose estimation, to demonstrate dynamic picking of objects, and opening of drawers. We show the performance and robustness of our model in two sets of real-world experiments including dynamic object retrieval and drawer opening, reporting a 51% and 82% success rate respectively. Code of our framework as well as videos are available on: https://spot-compose.github.io/.
Entropy Aware Message Passing in Graph Neural Networks
Mar 07, 2024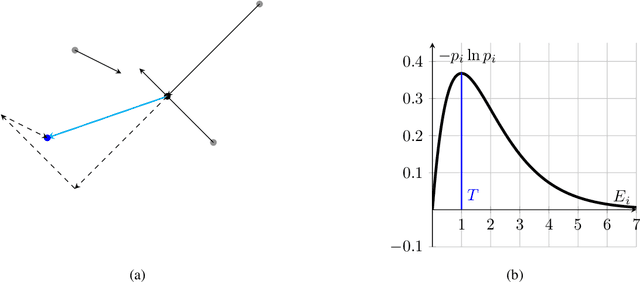
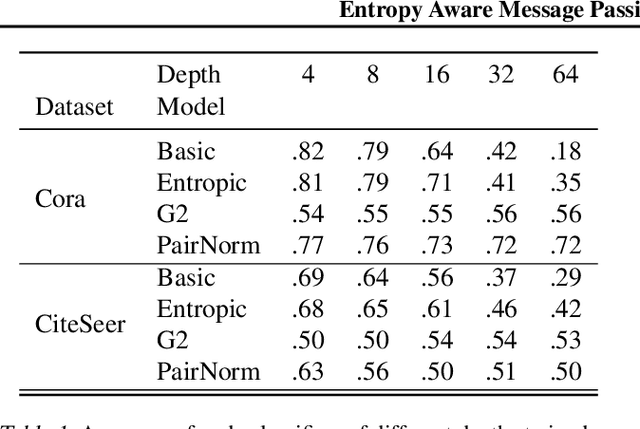
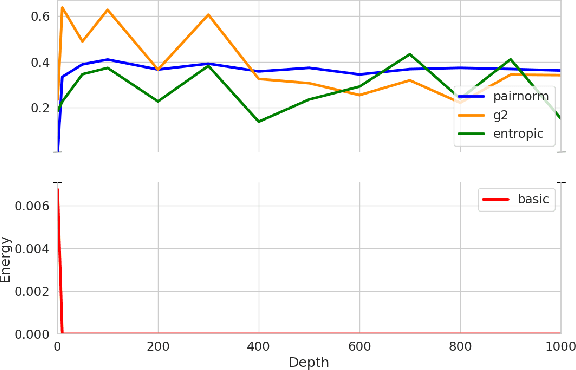
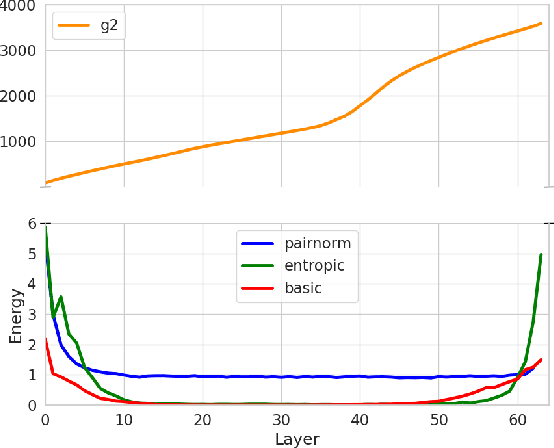
Deep Graph Neural Networks struggle with oversmoothing. This paper introduces a novel, physics-inspired GNN model designed to mitigate this issue. Our approach integrates with existing GNN architectures, introducing an entropy-aware message passing term. This term performs gradient ascent on the entropy during node aggregation, thereby preserving a certain degree of entropy in the embeddings. We conduct a comparative analysis of our model against state-of-the-art GNNs across various common datasets.