 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRed blood cell image generation for data augmentation using Conditional Generative Adversarial Networks
Jan 18, 2019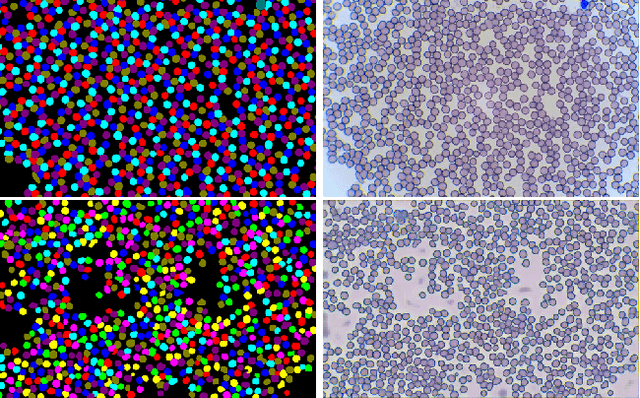
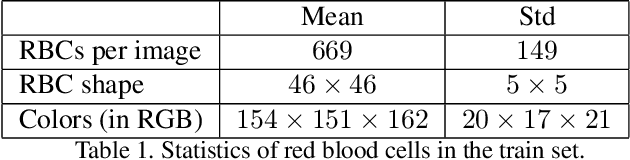
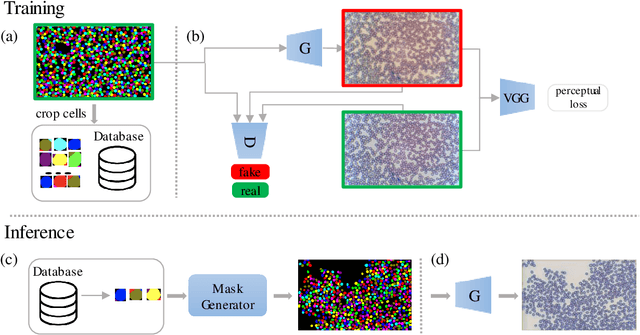
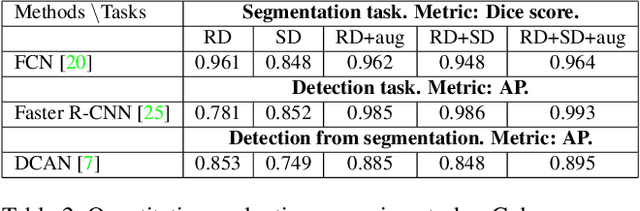
In this paper, we describe how to apply image-to-image translation techniques to medical blood smear data to generate new data samples and meaningfully increase small datasets. Specifically, given the segmentation mask of the microscopy image, we are able to generate photorealistic images of blood cells which are further used alongside real data during the network training for segmentation and object detection tasks. This image data generation approach is based on conditional generative adversarial networks which have proven capabilities to high-quality image synthesis. In addition to synthesizing blood images, we synthesize segmentation mask as well which leads to a diverse variety of generated samples. The effectiveness of the technique is thoroughly analyzed and quantified through a number of experiments on a manually collected and annotated dataset of blood smear taken under a microscope.
Light-weight place recognition and loop detection using road markings
Oct 20, 2017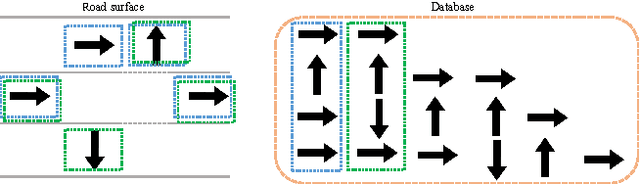

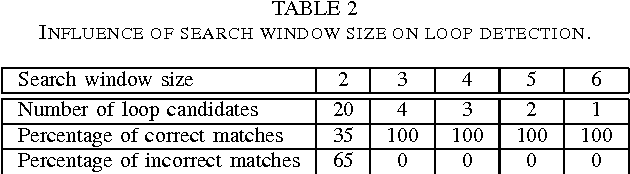
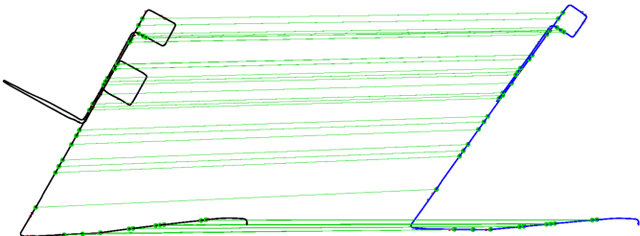
In this paper, we propose an efficient algorithm for robust place recognition and loop detection using camera information only. Our pipeline purely relies on spatial localization and semantic information of road markings. The creation of the database of road markings sequences is performed online, which makes the method applicable for real-time loop closure for visual SLAM techniques. Furthermore, our algorithm is robust to various weather conditions, occlusions from vehicles, and shadows. We have performed an extensive number of experiments which highlight the effectiveness and scalability of the proposed method.
VPGNet: Vanishing Point Guided Network for Lane and Road Marking Detection and Recognition
Oct 17, 2017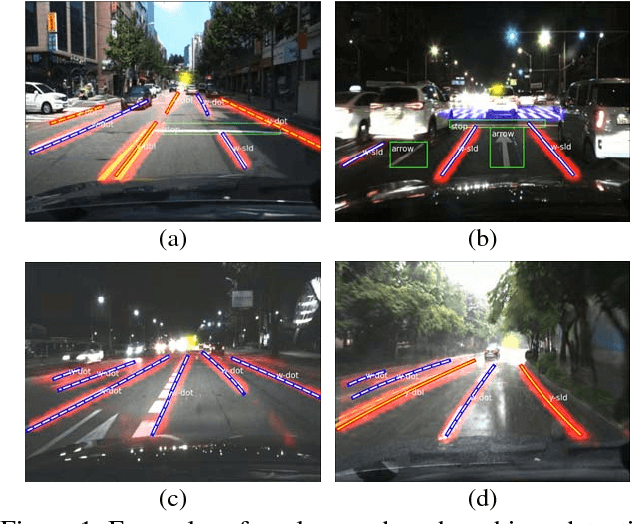
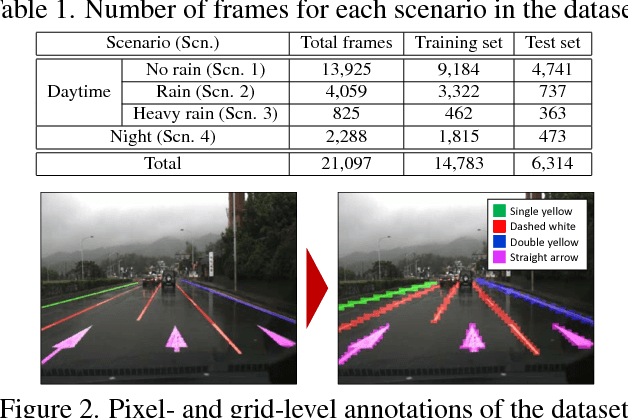
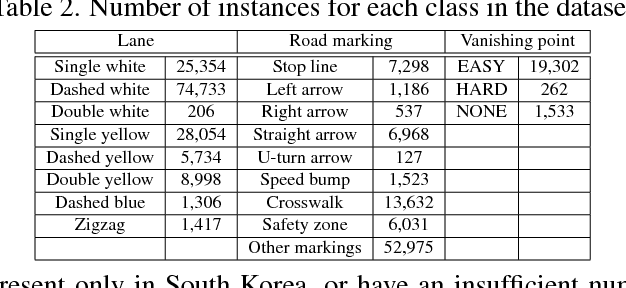
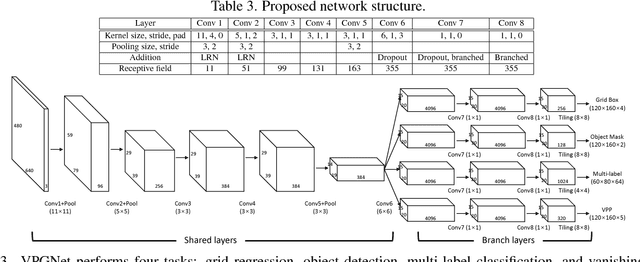
In this paper, we propose a unified end-to-end trainable multi-task network that jointly handles lane and road marking detection and recognition that is guided by a vanishing point under adverse weather conditions. We tackle rainy and low illumination conditions, which have not been extensively studied until now due to clear challenges. For example, images taken under rainy days are subject to low illumination, while wet roads cause light reflection and distort the appearance of lane and road markings. At night, color distortion occurs under limited illumination. As a result, no benchmark dataset exists and only a few developed algorithms work under poor weather conditions. To address this shortcoming, we build up a lane and road marking benchmark which consists of about 20,000 images with 17 lane and road marking classes under four different scenarios: no rain, rain, heavy rain, and night. We train and evaluate several versions of the proposed multi-task network and validate the importance of each task. The resulting approach, VPGNet, can detect and classify lanes and road markings, and predict a vanishing point with a single forward pass. Experimental results show that our approach achieves high accuracy and robustness under various conditions in real-time (20 fps). The benchmark and the VPGNet model will be publicly available.