 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Catheterization with Open-source Simulator and Expert Trajectory
Jan 20, 2024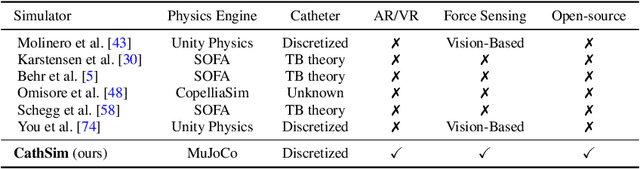
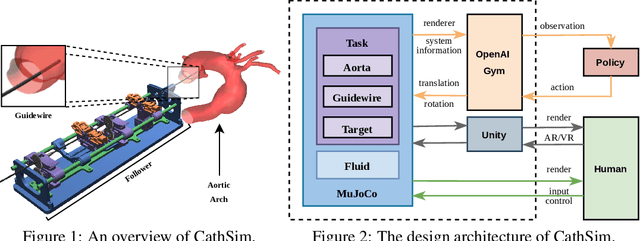
Endovascular robots have been actively developed in both academia and industry. However, progress toward autonomous catheterization is often hampered by the widespread use of closed-source simulators and physical phantoms. Additionally, the acquisition of large-scale datasets for training machine learning algorithms with endovascular robots is usually infeasible due to expensive medical procedures. In this chapter, we introduce CathSim, the first open-source simulator for endovascular intervention to address these limitations. CathSim emphasizes real-time performance to enable rapid development and testing of learning algorithms. We validate CathSim against the real robot and show that our simulator can successfully mimic the behavior of the real robot. Based on CathSim, we develop a multimodal expert navigation network and demonstrate its effectiveness in downstream endovascular navigation tasks. The intensive experimental results suggest that CathSim has the potential to significantly accelerate research in the autonomous catheterization field. Our project is publicly available at https://github.com/airvlab/cathsim.