 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Smooth Newton Methods for Deformable Multi-Body Dynamics
Jul 10, 2019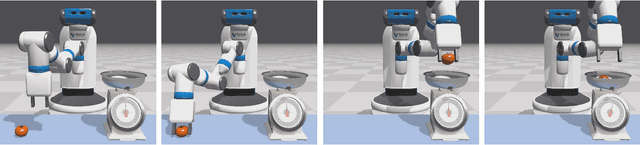
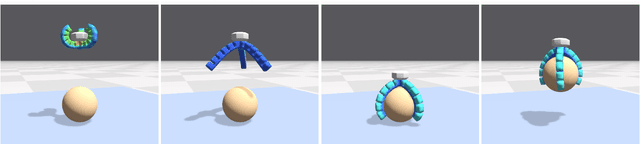
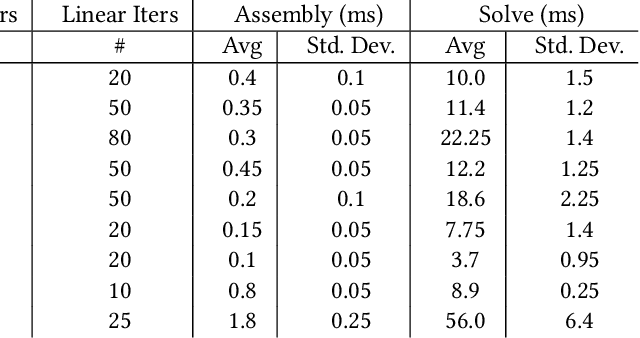
We present a framework for the simulation of rigid and deformable bodies in the presence of contact and friction. Our method is based on a non-smooth Newton iteration that solves the underlying nonlinear complementarity problems (NCPs) directly. This approach allows us to support nonlinear dynamics models, including hyperelastic deformable bodies and articulated rigid mechanisms, coupled through a smooth isotropic friction model. The fixed-point nature of our method means it requires only the solution of a symmetric linear system as a building block. We propose a new complementarity preconditioner for NCP functions that improves convergence, and we develop an efficient GPU-based solver based on the conjugate residual (CR) method that is suitable for interactive simulations. We show how to improve robustness using a new geometric stiffness approximation and evaluate our method's performance on a number of robotics simulation scenarios, including dexterous manipulation and training using reinforcement learning.
Tranquil Clouds: Neural Networks for Learning Temporally Coherent Features in Point Clouds
Jul 03, 2019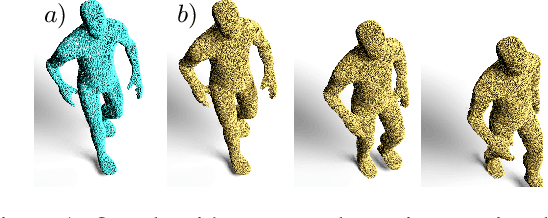
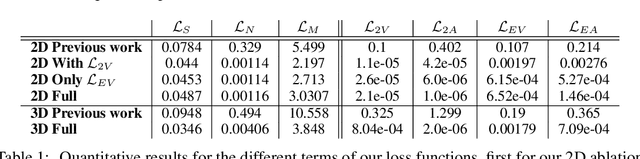
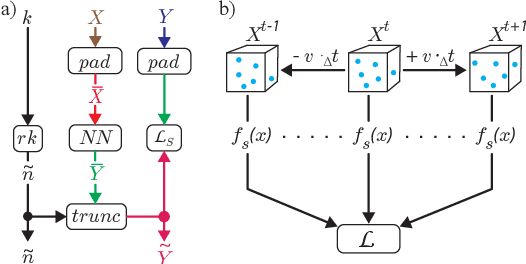

Point clouds, as a form of Lagrangian representation, allow for powerful and flexible applications in a large number of computational disciplines. We propose a novel deep-learning method to learn stable and temporally coherent feature spaces for points clouds that change over time. We identify a set of inherent problems with these approaches: without knowledge of the time dimension, the inferred solutions can exhibit strong flickering, and easy solutions to suppress this flickering can result in undesirable local minima that manifest themselves as halo structures. We propose a novel temporal loss function that takes into account higher time derivatives of the point positions, and encourages mingling, i.e., to prevent the aforementioned halos. We combine these techniques in a super-resolution method with a truncation approach to flexibly adapt the size of the generated positions. We show that our method works for large, deforming point sets from different sources to demonstrate the flexibility of our approach.
GPU-Accelerated Robotic Simulation for Distributed Reinforcement Learning
Oct 24, 2018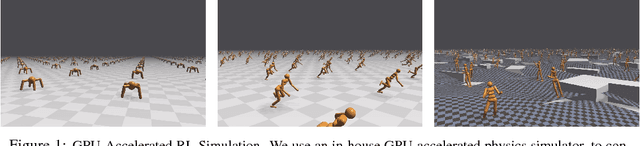
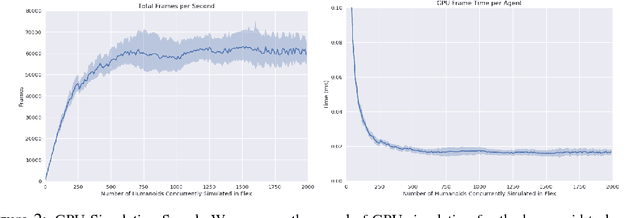

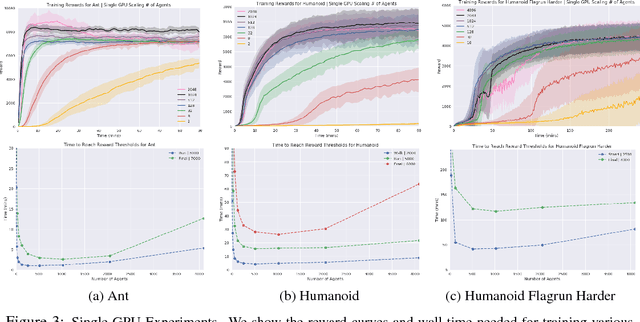
Most Deep Reinforcement Learning (Deep RL) algorithms require a prohibitively large number of training samples for learning complex tasks. Many recent works on speeding up Deep RL have focused on distributed training and simulation. While distributed training is often done on the GPU, simulation is not. In this work, we propose using GPU-accelerated RL simulations as an alternative to CPU ones. Using NVIDIA Flex, a GPU-based physics engine, we show promising speed-ups of learning various continuous-control, locomotion tasks. With one GPU and CPU core, we are able to train the Humanoid running task in less than 20 minutes, using 10-1000x fewer CPU cores than previous works. We also demonstrate the scalability of our simulator to multi-GPU settings to train more challenging locomotion tasks.