 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHITTER: A HumanoId Table TEnnis Robot via Hierarchical Planning and Learning
Aug 28, 2025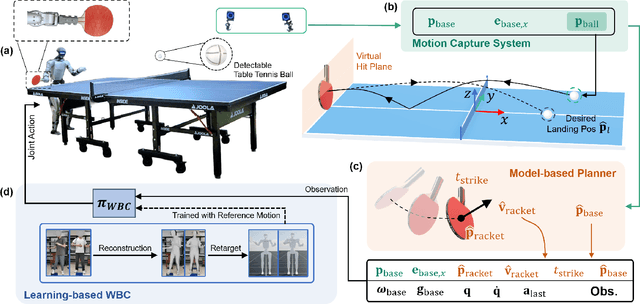
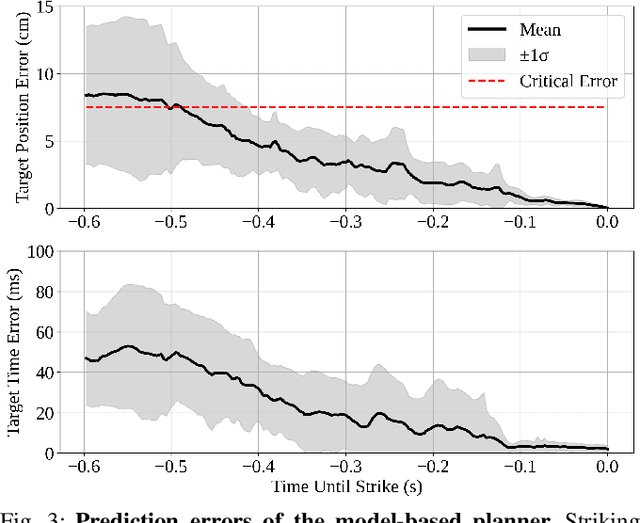
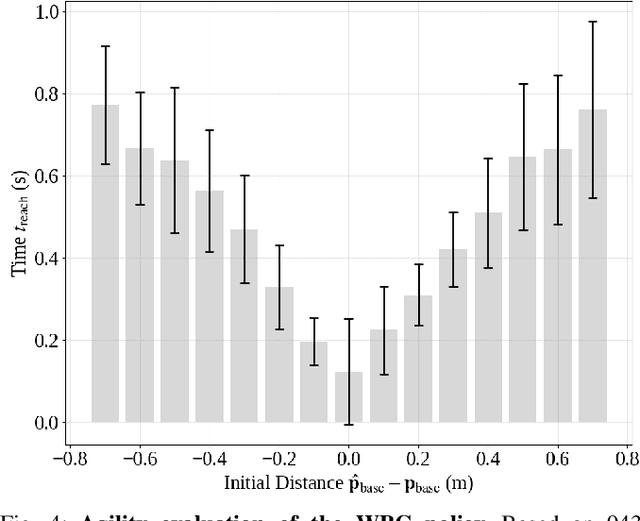
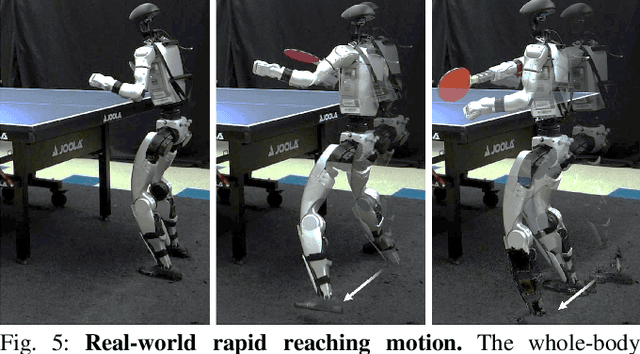
Humanoid robots have recently achieved impressive progress in locomotion and whole-body control, yet they remain constrained in tasks that demand rapid interaction with dynamic environments through manipulation. Table tennis exemplifies such a challenge: with ball speeds exceeding 5 m/s, players must perceive, predict, and act within sub-second reaction times, requiring both agility and precision. To address this, we present a hierarchical framework for humanoid table tennis that integrates a model-based planner for ball trajectory prediction and racket target planning with a reinforcement learning-based whole-body controller. The planner determines striking position, velocity and timing, while the controller generates coordinated arm and leg motions that mimic human strikes and maintain stability and agility across consecutive rallies. Moreover, to encourage natural movements, human motion references are incorporated during training. We validate our system on a general-purpose humanoid robot, achieving up to 106 consecutive shots with a human opponent and sustained exchanges against another humanoid. These results demonstrate real-world humanoid table tennis with sub-second reactive control, marking a step toward agile and interactive humanoid behaviors.
LATTE-MV: Learning to Anticipate Table Tennis Hits from Monocular Videos
Mar 26, 2025Physical agility is a necessary skill in competitive table tennis, but by no means sufficient. Champions excel in this fast-paced and highly dynamic environment by anticipating their opponent's intent - buying themselves the necessary time to react. In this work, we take one step towards designing such an anticipatory agent. Previous works have developed systems capable of real-time table tennis gameplay, though they often do not leverage anticipation. Among the works that forecast opponent actions, their approaches are limited by dataset size and variety. Our paper contributes (1) a scalable system for reconstructing monocular video of table tennis matches in 3D and (2) an uncertainty-aware controller that anticipates opponent actions. We demonstrate in simulation that our policy improves the ball return rate against high-speed hits from 49.9% to 59.0% as compared to a baseline non-anticipatory policy.
Role of Uncertainty in Anticipatory Trajectory Prediction for a Ping-Pong Playing Robot
Dec 05, 2023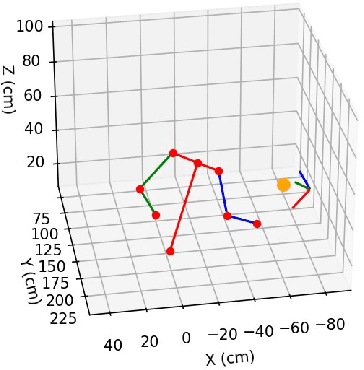
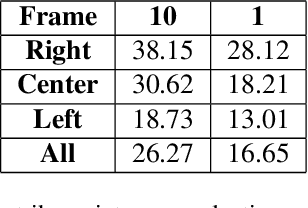
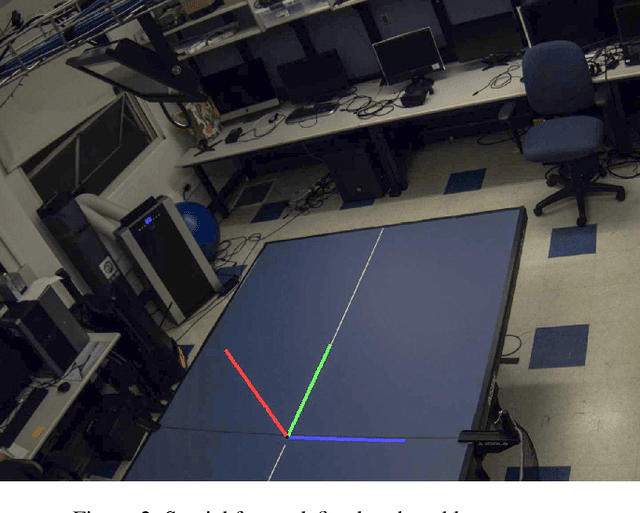
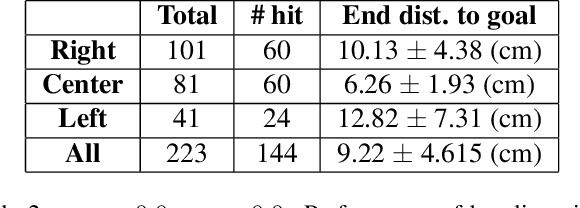
Robotic interaction in fast-paced environments presents a substantial challenge, particularly in tasks requiring the prediction of dynamic, non-stationary objects for timely and accurate responses. An example of such a task is ping-pong, where the physical limitations of a robot may prevent it from reaching its goal in the time it takes the ball to cross the table. The scene of a ping-pong match contains rich visual information of a player's movement that can allow future game state prediction, with varying degrees of uncertainty. To this aim, we present a visual modeling, prediction, and control system to inform a ping-pong playing robot utilizing visual model uncertainty to allow earlier motion of the robot throughout the game. We present demonstrations and metrics in simulation to show the benefit of incorporating model uncertainty, the limitations of current standard model uncertainty estimators, and the need for more verifiable model uncertainty estimation. Our code is publicly available.