 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRovoDev Code Reviewer: A Large-Scale Online Evaluation of LLM-based Code Review Automation at Atlassian
Jan 03, 2026Large Language Models (LLMs)-powered code review automation has the potential to transform code review workflows. Despite the advances of LLM-powered code review comment generation approaches, several practical challenges remain for designing enterprise-grade code review automation tools. In particular, this paper aims at answering the practical question: how can we design a review-guided, context-aware, quality-checked code review comment generation without fine-tuning? In this paper, we present RovoDev Code Reviewer, an enterprise-grade LLM-based code review automation tool designed and deployed at scale within Atlassian's development ecosystem with seamless integration into Atlassian's Bitbucket. Through the offline, online, user feedback evaluations over a one-year period, we conclude that RovoDev Code Reviewer is (1) effective in generating code review comments that could lead to code resolution for 38.70% (i.e., comments that triggered code changes in the subsequent commits); and (2) offers the promise of accelerating feedback cycles (i.e., decreasing the PR cycle time by 30.8%), alleviating reviewer workload (i.e., reducing the number of human-written comments by 35.6%), and improving overall software quality (i.e., finding errors with actionable suggestions).
Role of Uncertainty in Anticipatory Trajectory Prediction for a Ping-Pong Playing Robot
Dec 05, 2023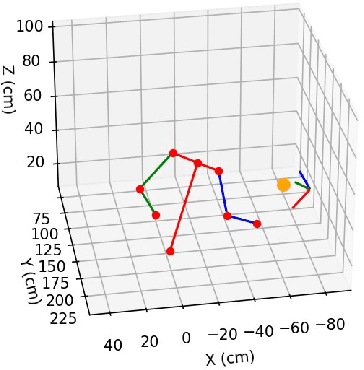
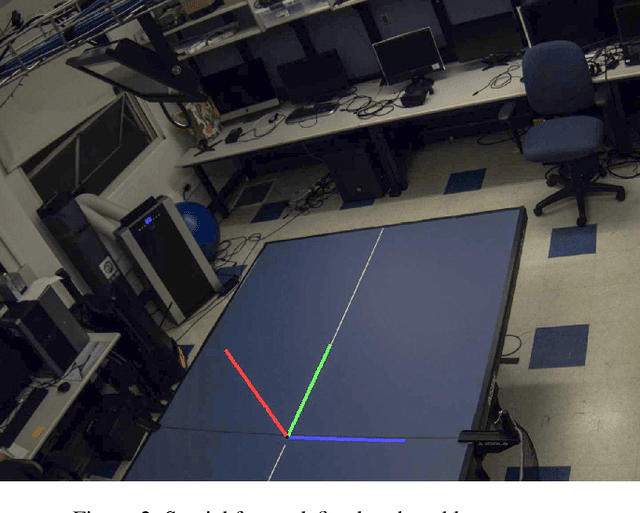
Robotic interaction in fast-paced environments presents a substantial challenge, particularly in tasks requiring the prediction of dynamic, non-stationary objects for timely and accurate responses. An example of such a task is ping-pong, where the physical limitations of a robot may prevent it from reaching its goal in the time it takes the ball to cross the table. The scene of a ping-pong match contains rich visual information of a player's movement that can allow future game state prediction, with varying degrees of uncertainty. To this aim, we present a visual modeling, prediction, and control system to inform a ping-pong playing robot utilizing visual model uncertainty to allow earlier motion of the robot throughout the game. We present demonstrations and metrics in simulation to show the benefit of incorporating model uncertainty, the limitations of current standard model uncertainty estimators, and the need for more verifiable model uncertainty estimation. Our code is publicly available.