 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient optimization-based trajectory planning
Dec 29, 2023



This study proposes a unified optimization-based planning framework that addresses the precise and efficient navigation of a controlled object within a constrained region, while contending with obstacles. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Interaction-Aware Trajectory Prediction and Planning in Dense Highway Traffic using Distributed Model Predictive Control
Aug 24, 2023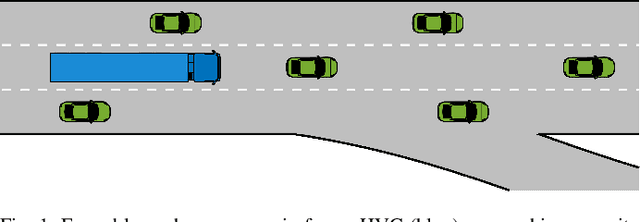
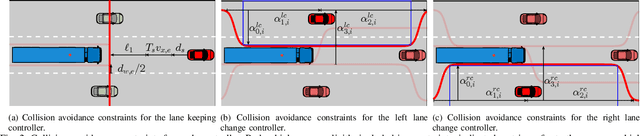
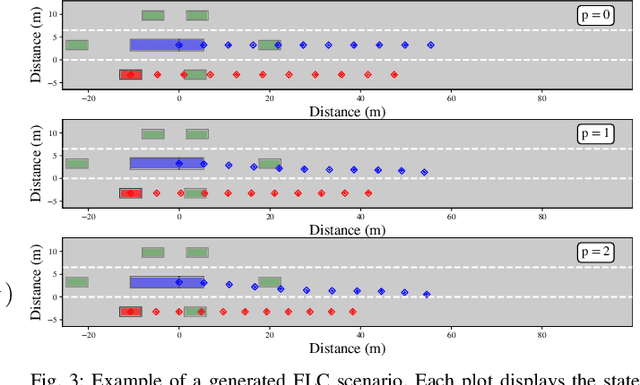
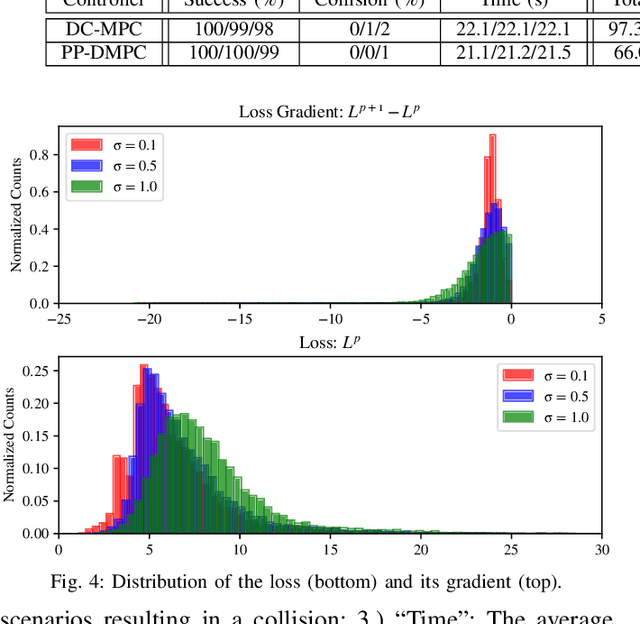
In this paper we treat optimal trajectory planning for an autonomous vehicle (AV) operating in dense traffic, where vehicles closely interact with each other. To tackle this problem, we present a novel framework that couples trajectory prediction and planning in multi-agent environments, using distributed model predictive control. A demonstration of our framework is presented in simulation, employing a trajectory planner using non-linear model predictive control. We analyze performance and convergence of our framework, subject to different prediction errors. The results indicate that the obtained locally optimal solutions are improved, compared with decoupled prediction and planning.
Efficient collision avoidance for autonomous vehicles in polygonal domains
Aug 17, 2023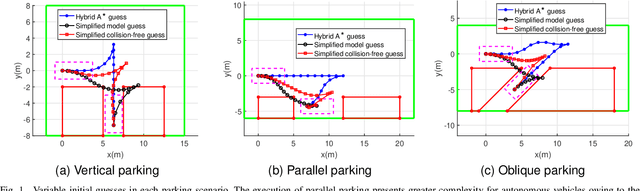
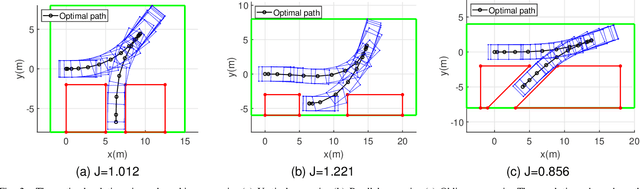
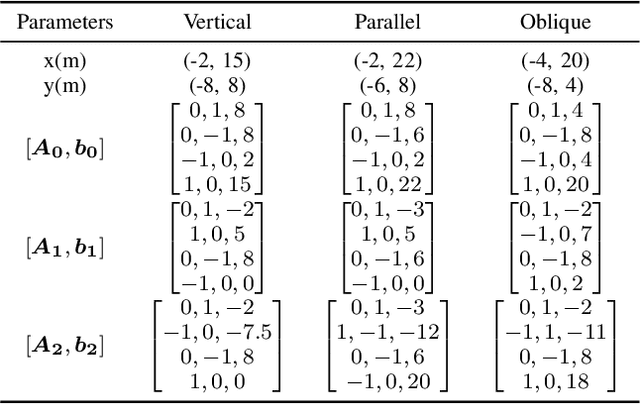
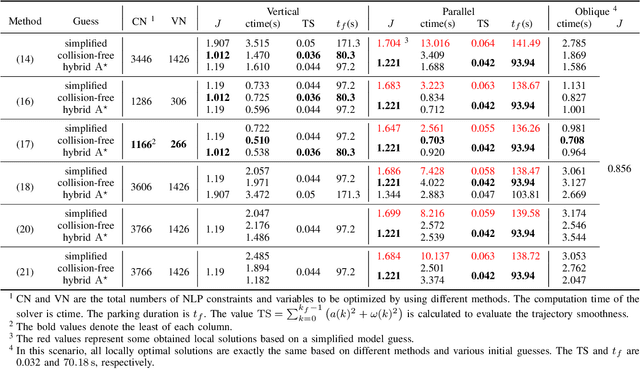
This research focuses on trajectory planning problems for autonomous vehicles utilizing numerical optimal control techniques. The study reformulates the constrained optimization problem into a nonlinear programming problem, incorporating explicit collision avoidance constraints. We present three novel, exact formulations to describe collision constraints. The first formulation is derived from a proposition concerning the separation of a point and a convex set. We prove the separating proposition through De Morgan's laws. Then, leveraging the hyperplane separation theorem we propose two efficient reformulations. Compared with the existing dual formulations and the first formulation, they significantly reduce the number of auxiliary variables to be optimized and inequality constraints within the nonlinear programming problem. Finally, the efficacy of the proposed formulations is demonstrated in the context of typical autonomous parking scenarios compared with state of the art. For generality, we design three initial guesses to assess the computational effort required for convergence to solutions when using the different collision formulations. The results illustrate that the scheme employing De Morgan's laws performs equally well with those utilizing dual formulations, while the other two schemes based on hyperplane separation theorem exhibit the added benefit of requiring lower computational resources.
Prediction of Time and Distance of Trips Using Explainable Attention-based LSTMs
Mar 27, 2023In this paper, we propose machine learning solutions to predict the time of future trips and the possible distance the vehicle will travel. For this prediction task, we develop and investigate four methods. In the first method, we use long short-term memory (LSTM)-based structures specifically designed to handle multi-dimensional historical data of trip time and distances simultaneously. Using it, we predict the future trip time and forecast the distance a vehicle will travel by concatenating the outputs of LSTM networks through fully connected layers. The second method uses attention-based LSTM networks (At-LSTM) to perform the same tasks. The third method utilizes two LSTM networks in parallel, one for forecasting the time of the trip and the other for predicting the distance. The output of each LSTM is then concatenated through fully connected layers. Finally, the last model is based on two parallel At-LSTMs, where similarly, each At-LSTM predicts time and distance separately through fully connected layers. Among the proposed methods, the most advanced one, i.e., parallel At-LSTM, predicts the next trip's distance and time with 3.99% error margin where it is 23.89% better than LSTM, the first method. We also propose TimeSHAP as an explainability method for understanding how the networks perform learning and model the sequence of information.
Critical Zones for Comfortable Collision Avoidance with a Leading Vehicle
Mar 26, 2023This paper provides a general framework for efficiently obtaining the appropriate intervention time for collision avoidance systems to just avoid a rear-end crash. The proposed framework incorporates a driver comfort model and a vehicle model. We show that there is a relationship between driver steering manoeuvres based on acceleration and jerk, and steering angle and steering angle rate profiles. We investigate how four different vehicle models influence the time when steering needs to be initiated to avoid a rear-end collision. The models assessed were: a dynamic bicycle model (DM), a steady-state cornering model (SSCM), a kinematic model (KM) and a point mass model (PMM). We show that all models can be described by a parameter-varying linear system. We provide three algorithms for steering that use a linear system to compute the intervention time efficiently for all four vehicle models. Two of the algorithms use backward reachability simulation and one uses forward simulation. Results show that the SSCM, KM and PMM do not accurately estimate the intervention time for a certain set of vehicle conditions. Due to its fast computation time, DM with a backward reachability algorithm can be used for rapid offline safety benefit assessment, while DM with a forward simulation algorithm is better suited for online real-time usage.
A Unified Framework for Online Trip Destination Prediction
Jan 12, 2021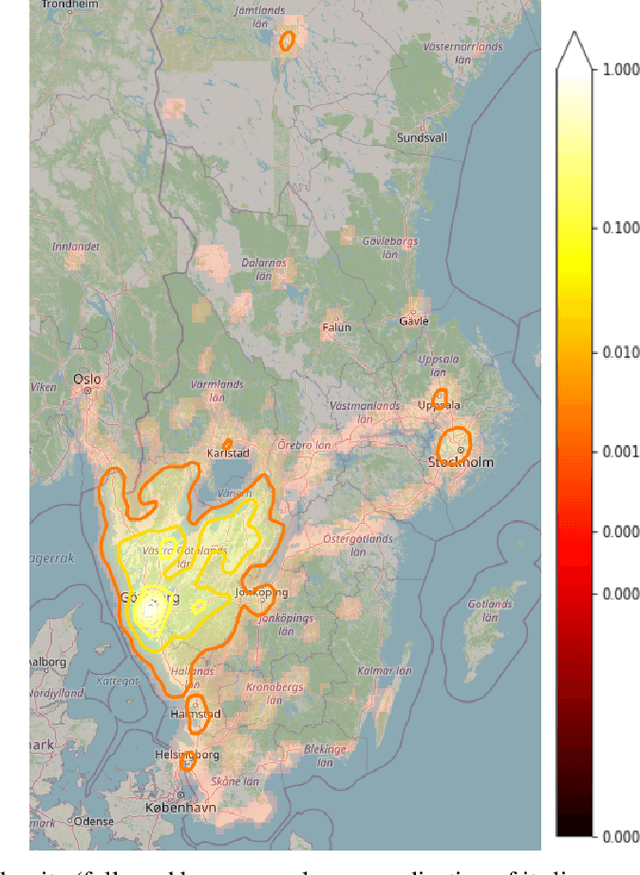
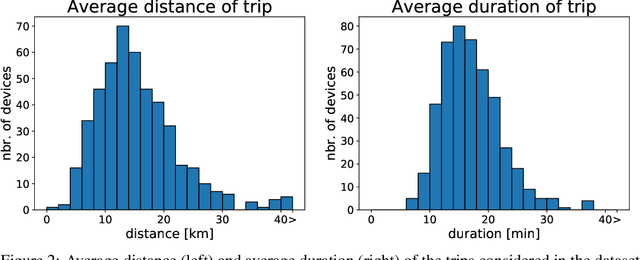
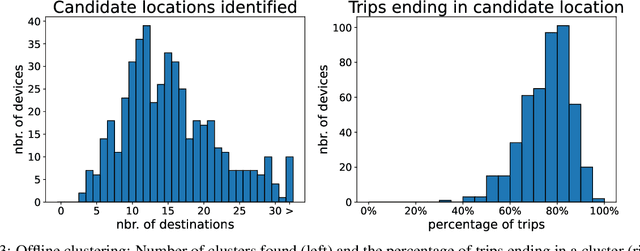
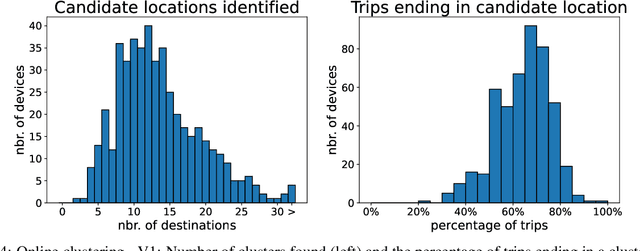
Trip destination prediction is an area of increasing importance in many applications such as trip planning, autonomous driving and electric vehicles. Even though this problem could be naturally addressed in an online learning paradigm where data is arriving in a sequential fashion, the majority of research has rather considered the offline setting. In this paper, we present a unified framework for trip destination prediction in an online setting, which is suitable for both online training and online prediction. For this purpose, we develop two clustering algorithms and integrate them within two online prediction models for this problem. We investigate the different configurations of clustering algorithms and prediction models on a real-world dataset. By using traditional clustering metrics and accuracy, we demonstrate that both the clustering and the entire framework yield consistent results compared to the offline setting. Finally, we propose a novel regret metric for evaluating the entire online framework in comparison to its offline counterpart. This metric makes it possible to relate the source of erroneous predictions to either the clustering or the prediction model. Using this metric, we show that the proposed methods converge to a probability distribution resembling the true underlying distribution and enjoy a lower regret than all of the baselines.