 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteraction-Aware Trajectory Prediction and Planning in Dense Highway Traffic using Distributed Model Predictive Control
Aug 24, 2023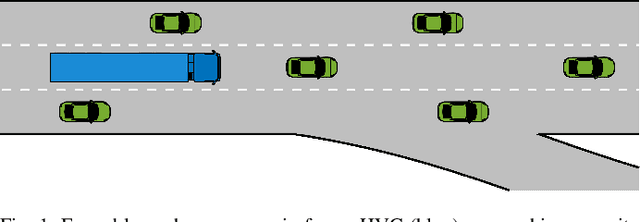
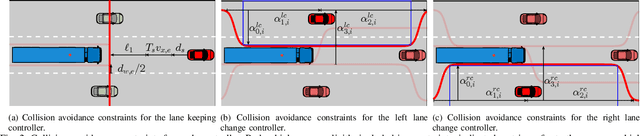
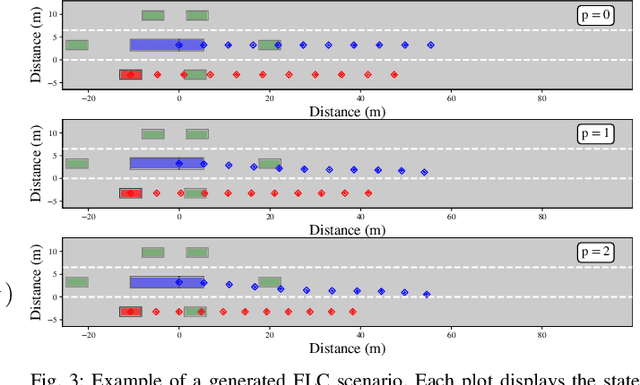
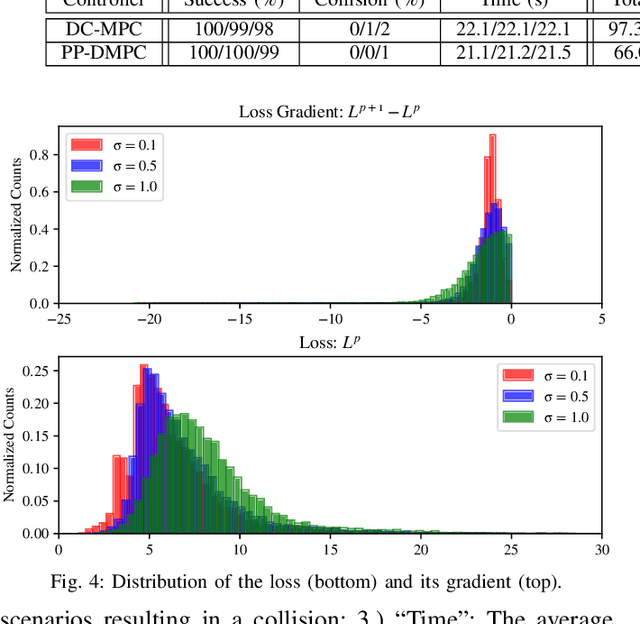
In this paper we treat optimal trajectory planning for an autonomous vehicle (AV) operating in dense traffic, where vehicles closely interact with each other. To tackle this problem, we present a novel framework that couples trajectory prediction and planning in multi-agent environments, using distributed model predictive control. A demonstration of our framework is presented in simulation, employing a trajectory planner using non-linear model predictive control. We analyze performance and convergence of our framework, subject to different prediction errors. The results indicate that the obtained locally optimal solutions are improved, compared with decoupled prediction and planning.
Asymptotic Stability in Reservoir Computing
Jun 07, 2022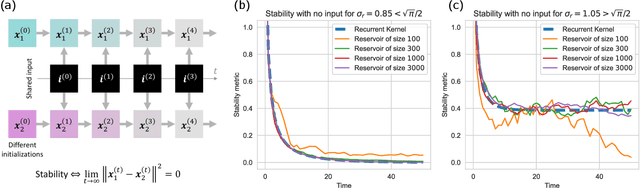
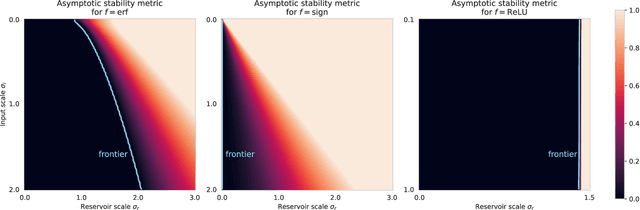
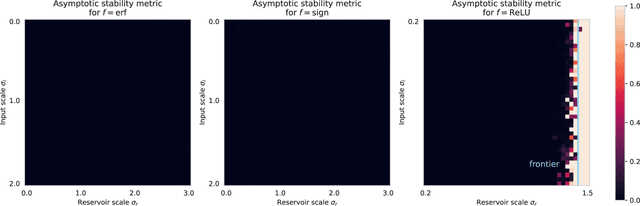
Reservoir Computing is a class of Recurrent Neural Networks with internal weights fixed at random. Stability relates to the sensitivity of the network state to perturbations. It is an important property in Reservoir Computing as it directly impacts performance. In practice, it is desirable to stay in a stable regime, where the effect of perturbations does not explode exponentially, but also close to the chaotic frontier where reservoir dynamics are rich. Open questions remain today regarding input regularization and discontinuous activation functions. In this work, we use the recurrent kernel limit to draw new insights on stability in reservoir computing. This limit corresponds to large reservoir sizes, and it already becomes relevant for reservoirs with a few hundred neurons. We obtain a quantitative characterization of the frontier between stability and chaos, which can greatly benefit hyperparameter tuning. In a broader sense, our results contribute to understanding the complex dynamics of Recurrent Neural Networks.