 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring new Approaches for Information Retrieval through Natural Language Processing
May 04, 2025This review paper explores recent advancements and emerging approaches in Information Retrieval (IR) applied to Natural Language Processing (NLP). We examine traditional IR models such as Boolean, vector space, probabilistic, and inference network models, and highlight modern techniques including deep learning, reinforcement learning, and pretrained transformer models like BERT. We discuss key tools and libraries - Lucene, Anserini, and Pyserini - for efficient text indexing and search. A comparative analysis of sparse, dense, and hybrid retrieval methods is presented, along with applications in web search engines, cross-language IR, argument mining, private information retrieval, and hate speech detection. Finally, we identify open challenges and future research directions to enhance retrieval accuracy, scalability, and ethical considerations.
Explainability in AI Based Applications: A Framework for Comparing Different Techniques
Oct 28, 2024The integration of artificial intelligence into business processes has significantly enhanced decision-making capabilities across various industries such as finance, healthcare, and retail. However, explaining the decisions made by these AI systems poses a significant challenge due to the opaque nature of recent deep learning models, which typically function as black boxes. To address this opacity, a multitude of explainability techniques have emerged. However, in practical business applications, the challenge lies in selecting an appropriate explainability method that balances comprehensibility with accuracy. This paper addresses the practical need of understanding differences in the output of explainability techniques by proposing a novel method for the assessment of the agreement of different explainability techniques. Based on our proposed methods, we provide a comprehensive comparative analysis of six leading explainability techniques to help guiding the selection of such techniques in practice. Our proposed general-purpose method is evaluated on top of one of the most popular deep learning architectures, the Vision Transformer model, which is frequently employed in business applications. Notably, we propose a novel metric to measure the agreement of explainability techniques that can be interpreted visually. By providing a practical framework for understanding the agreement of diverse explainability techniques, our research aims to facilitate the broader integration of interpretable AI systems in business applications.
Does elderly enjoy playing Bingo with a robot? A case study with the humanoid robot Nadine
May 05, 2021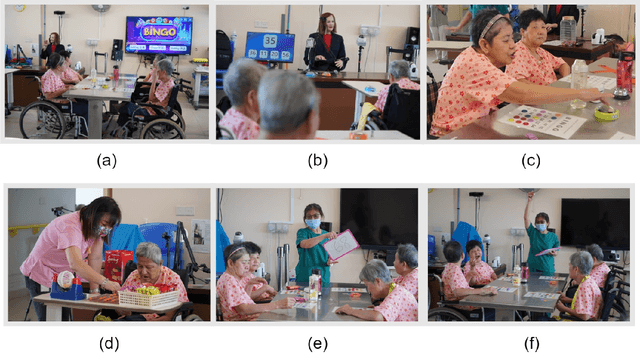
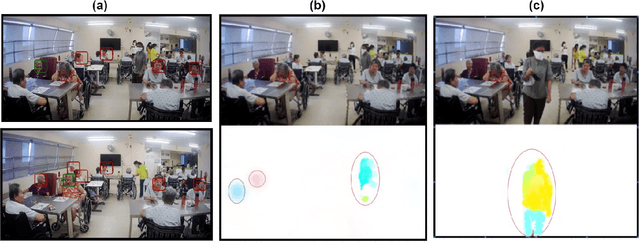
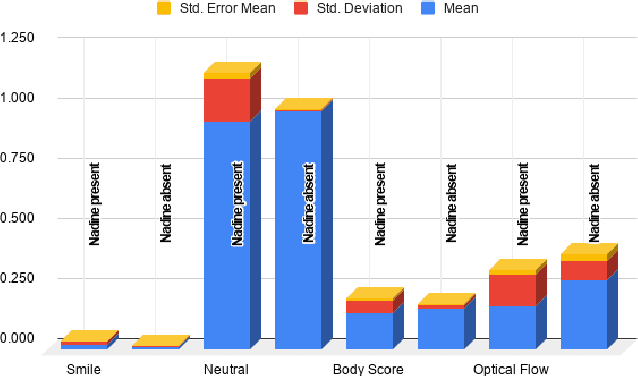
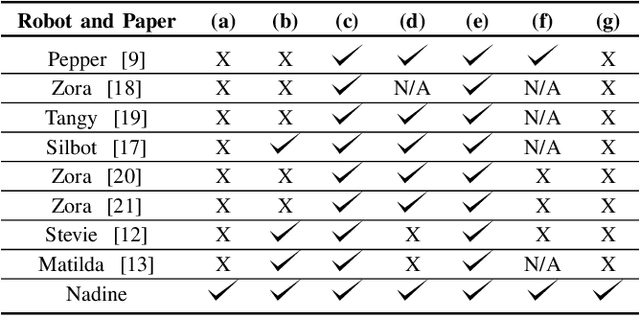
There are considerable advancements in medical health care in recent years, resulting in rising older population. As the workforce for such a population is not keeping pace, there is an urgent need to address this problem. Having robots to stimulating recreational activities for older adults can reduce the workload for caretakers and give them time to address the emotional needs of the elderly. In this paper, we investigate the effects of the humanoid social robot Nadine as an activity host for the elderly. This study aims to analyse if the elderly feels comfortable and enjoy playing game/activity with the humanoid robot Nadine. We propose to evaluate this by placing Nadine humanoid social robot in a nursing home as a caretaker where she hosts bingo game. We record sessions with and without Nadine to understand the difference and acceptance of these two scenarios. We use computer vision methods to analyse the activities of the elderly to detect emotions and their involvement in the game. We envision that such humanoid robots will make recreational activities more readily available for the elderly. Our results present positive enforcement during recreational activity, Bingo, in the presence of Nadine.
Can a Humanoid Robot be part of the Organizational Workforce? A User Study Leveraging Sentiment Analysis
May 30, 2019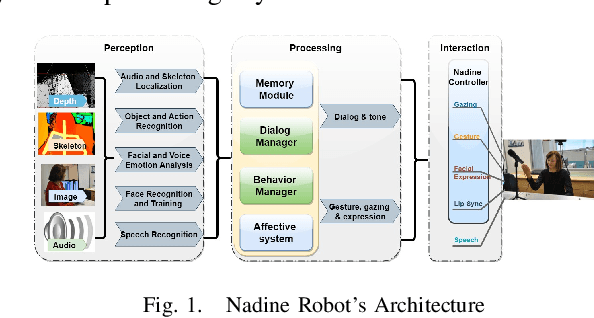
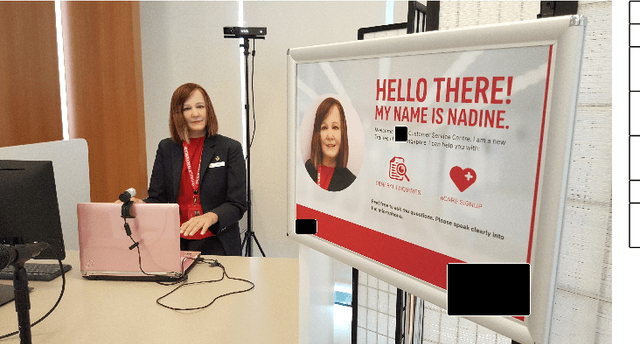
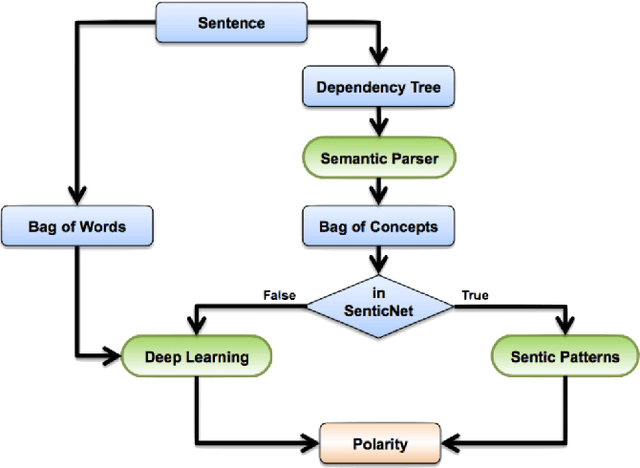
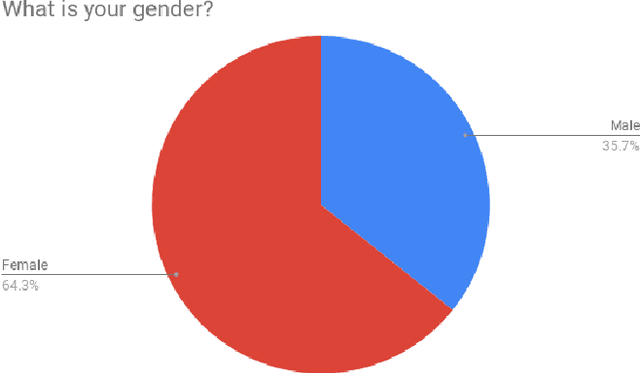
Hiring robots for the workplaces is a challenging task as robots have to cater to customer demands, follow organizational protocols and behave with social etiquette. In this study, we propose to have a humanoid social robot, Nadine, as a customer service agent in an open social work environment. The objective of this study is to analyze the effects of humanoid robots on customers at work environment, and see if it can handle social scenarios. We propose to evaluate these objectives through two modes, namely, survey questionnaire and customer feedback. We also propose a novel approach to analyze customer feedback data (text) using sentic computing methods. Specifically, we employ aspect extraction and sentiment analysis to analyze the data. From our framework, we detect sentiment associated to the aspects that mainly concerned the customers during their interaction. This allows us to understand customers expectations and current limitations of robots as employees.